Omnidirectional movement unmanned driving platform method based on highway tunnel crack detection
An unmanned, highway technology, applied in measurement devices, two-dimensional position/channel control, instruments, etc., can solve the problem of not getting rid of the participation of technicians, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
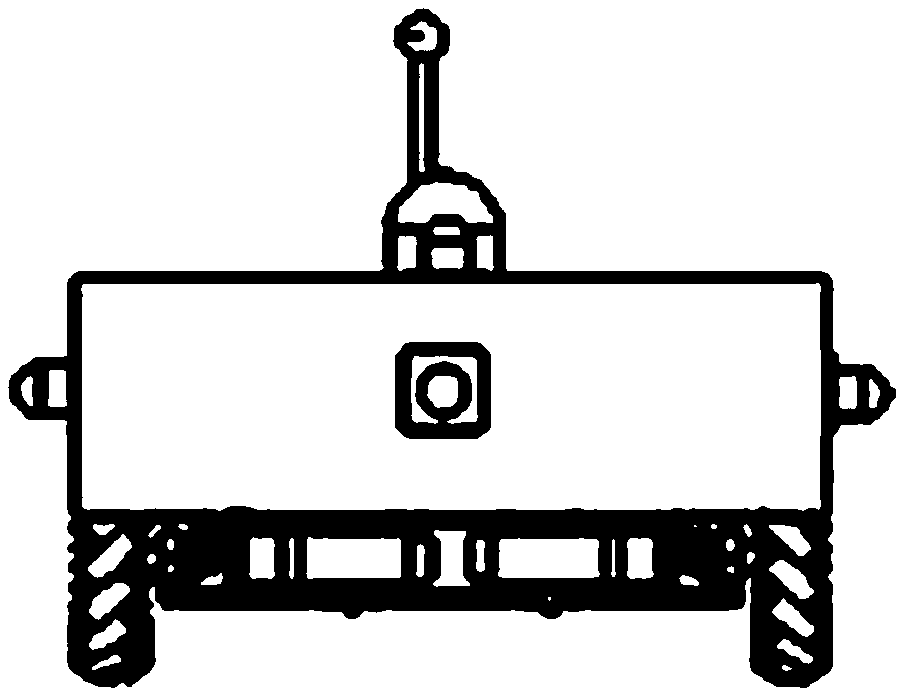
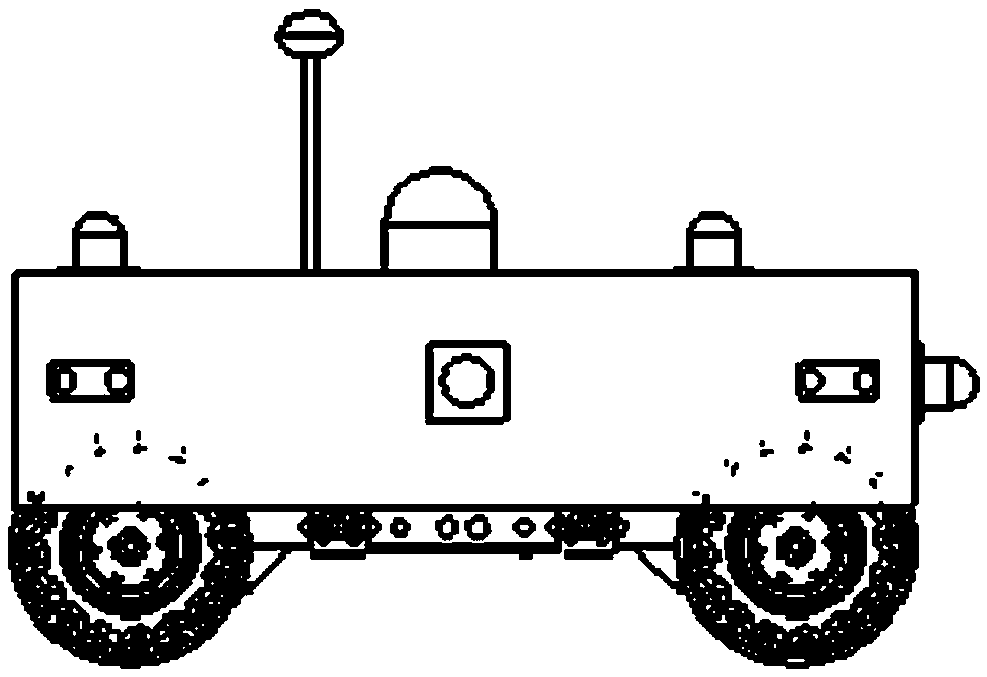
[0059] The invention provides an omnidirectional mobile unmanned driving platform based on expressway tunnel crack detection, which is characterized in that: the platform includes a car body (5) and a mecanum wheel (30) arranged at the bottom of the car body (5); The mecanum wheel is arranged on the bottom of the car body (5) through a stage clip (31). The motor is connected, the motor is connected to the motor drive, the motor drive is connected to the main control single-chip microcomputer (13), and the main control single-chip microcomputer (13) is connected to the computer (18), ultrasonic module, GPS and nine-axis sensor module (2); the computer (18) is connected to the laser Radar (3) and camera;
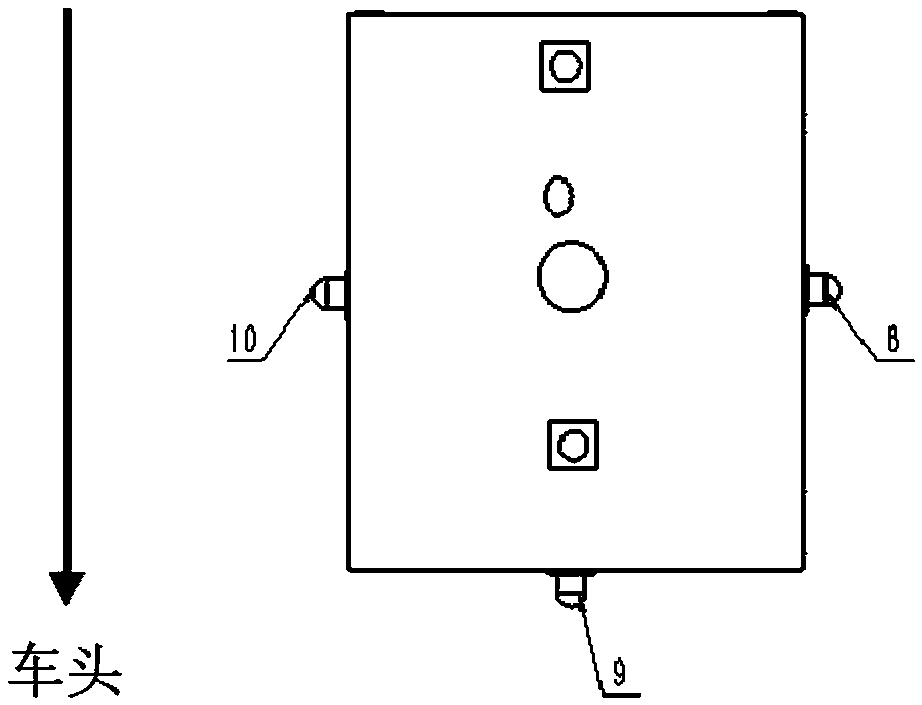
[0060] The laser radar (3) is installed on the top of the car body (5); there are four ultrasonic sensors, and two of the four ultrasonic sensors are installed on the left and right sides of the car body; the GPS and nine-axis sensor modules (2) are supported on the car body b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com