Large-scale monitoring method and monitoring robot based on deep weighted double q learning
A robot, a large-scale technology, applied in neural learning methods, machine learning, program-controlled manipulators, etc., can solve the problems that the monitoring system cannot be fully deployed and the camera capacity is limited.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
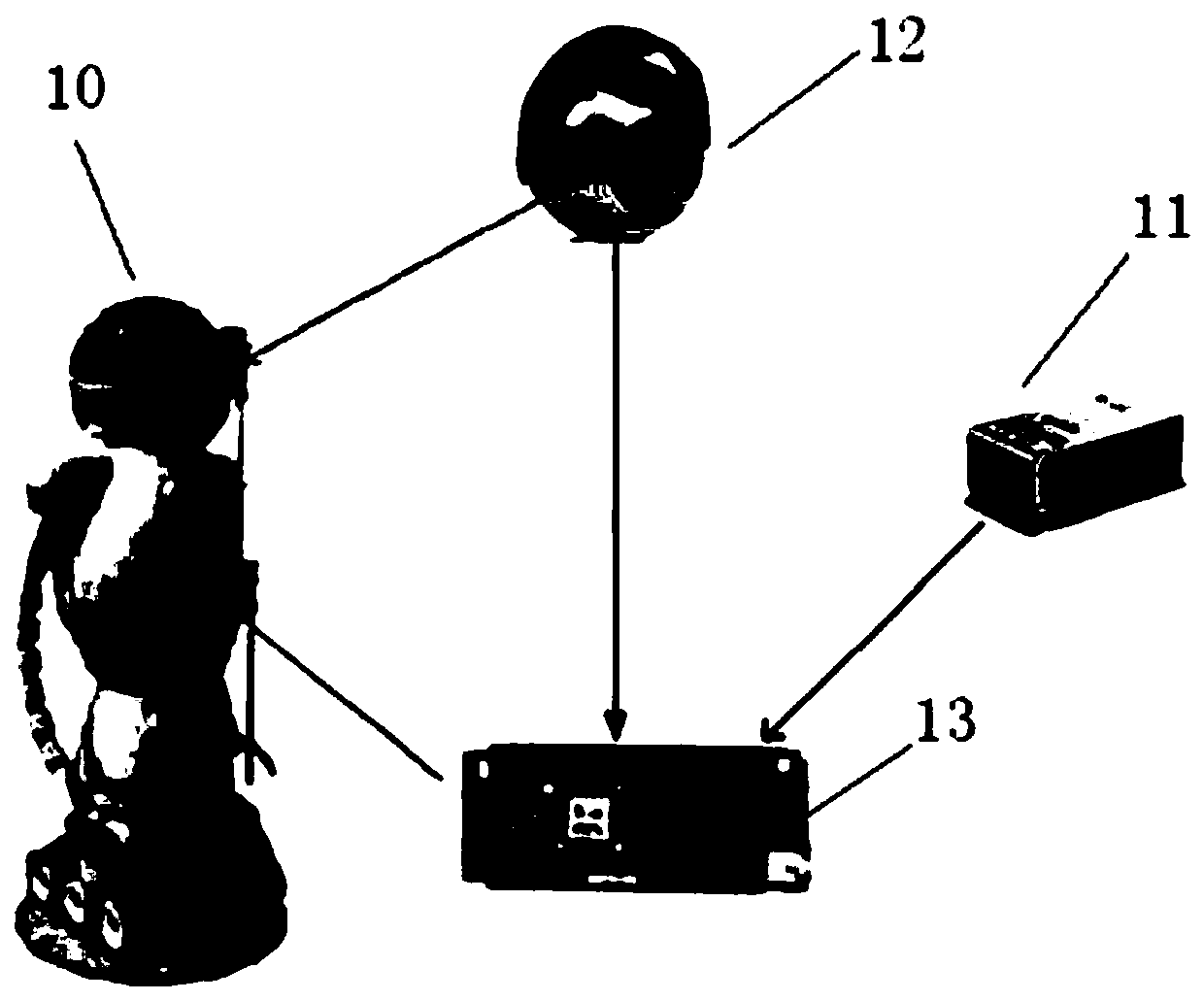
[0071] see figure 1 , as shown in the legend, is a wide-range monitoring robot 10 based on deep weighted double-Q learning. The Q-value table of the robot 10 includes Q A Table and Q B Table, the Q value is calculated by the depth estimation network parameter θ, where,
[0072] Q A The update formula for the value is as follows:
[0073]
[0074] δ=R(s,a)+γ[β A Q A (s',a * ;θ)+(1-β A ) Q B (s',a * ;θ)]-Q A (s, a; θ);
[0075] Q A ← Q A (s,a;θ)+α(s,a)δ;
[0076] Q B The update formula for the value is as follows:
[0077]
[0078] δ=R(s,a)+γ[β B Q B (s',a * ;θ)+(1-β B ) Q A (s',a * ;θ)]-Q B (s, a; θ);
[0079] Q B ← Q B (s,a;θ)+α(s,a)δ;
[0080] Among them, β A , β B Indicates the weight; s' indicates the next state; a * Indicates the optimal action for the next state; a L Represents the worst action in the next state; c is a free parameter, c≥0; δ represents time difference; R represents reward value; γ represents target discount, 0≤γ≤1; s r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com