Complete coverage path planning method for multi-robot system
A multi-robot, traversal path technology, applied in the field of information technology and robotics, can solve the problems of low activity value and inability to escape from deadlock areas, etc., achieve the effect of improving coverage efficiency, achieving coverage efficiency, and reducing coverage time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The present invention will be described in further detail below through specific embodiments and accompanying drawings.
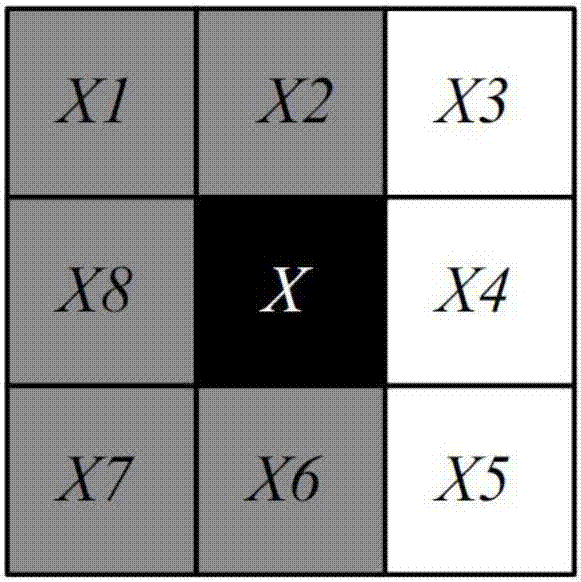
[0023] The robot in the present invention works in a variable environment, and what is considered here is the path planning problem in a two-dimensional environment. The entire workspace is divided into small squares (grids). The size of each grid (neuron in the bioinspired neural network) is equal to the size of the robot's actuators. For a sweeping robot, the side length of the grid is equal to the diameter of the chassis of the sweeping robot, which is known. However, the dynamically changing environment information is unknown at the beginning, and the robot needs to detect it step by step through sensors during the walking process.
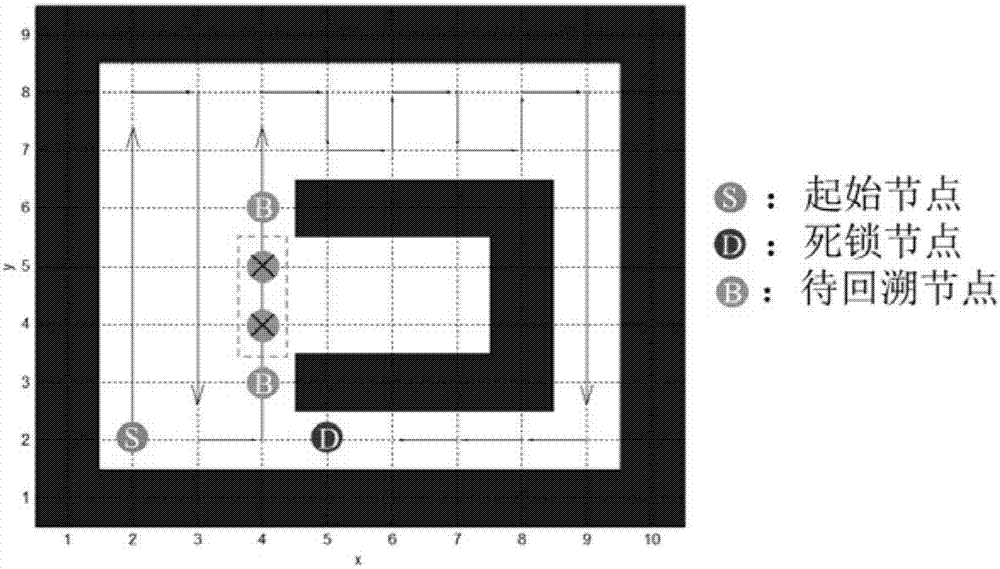
[0024] figure 1 It is a flow chart of the method for planning a complete traversal path for a multi-robot system of the present invention. Here the workspace is treated as a raster map. Each robot perceives envi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com