Dynamic force bearing center position detection method for symmetrical-layout multi-rotor unmanned aerial vehicle
A multi-rotor UAV, center position technology, applied in three-dimensional position/course control, vehicle position/route/height control, attitude control, etc., can solve the problem that multi-rotor UAVs cannot fit together perfectly, Achieve the effects of improving energy utilization, strong innovation, and enhanced stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
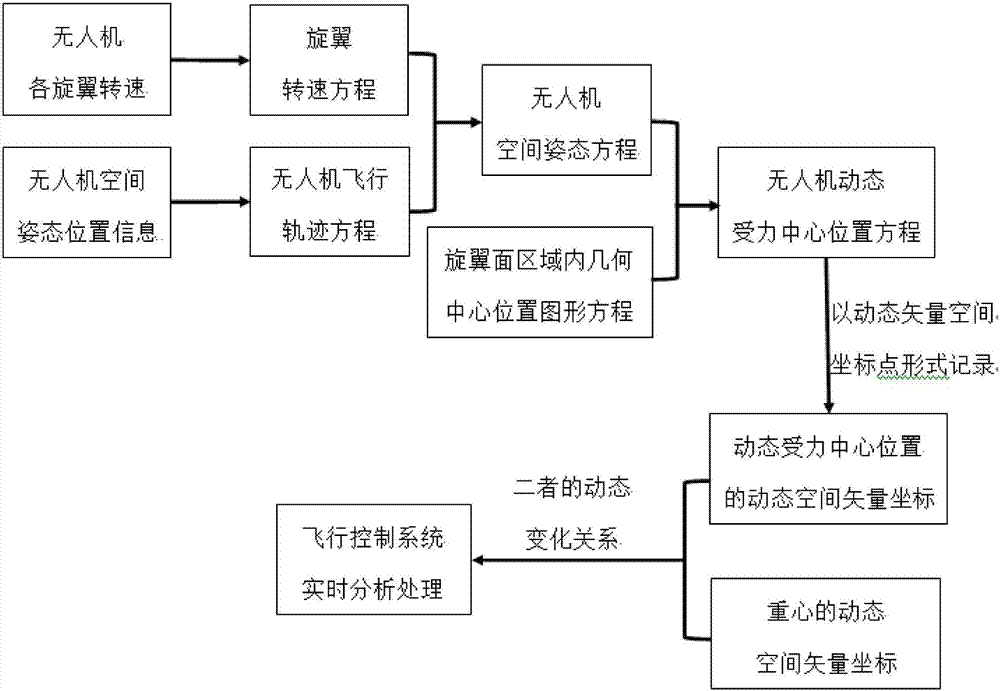
[0035] see figure 1 with figure 2 , the detection method of the dynamic stress center position of the symmetrical layout multi-rotor UAV of the present invention comprises the following steps:
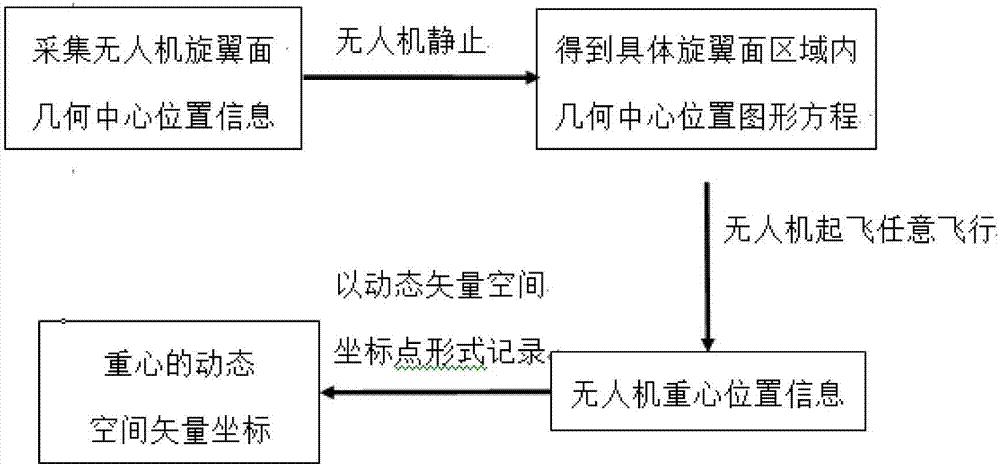
[0036] (1) The symmetrical layout of the multi-rotor UAV is static, and the geometric center position information of the UAV rotor surface is collected to obtain the geometric center position graphic equation in the specific rotor surface area;
[0037] (2) The multi-rotor UAV with a symmetrical layout takes off and flies arbitrarily, and the center of gravity position information of the UAV is obtained by using the graphical equation of the geometric center position, which is recorded in the form of a dynamic vector space coordinate point;
[0038] (3) Utilize the sensor to c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com