Permanent magnet linear motor position sensorless control method based on novel disturbance observer
A technology of permanent magnet linear motor and disturbance observer, which is applied in motor generator control, AC motor control, electronic commutation motor control, etc., can solve the problems of high cost, poor reliability, and difficulty in large-scale implementation, and achieve broadband The effect of widening and stability, improving the suppression ability, and broadening the application field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
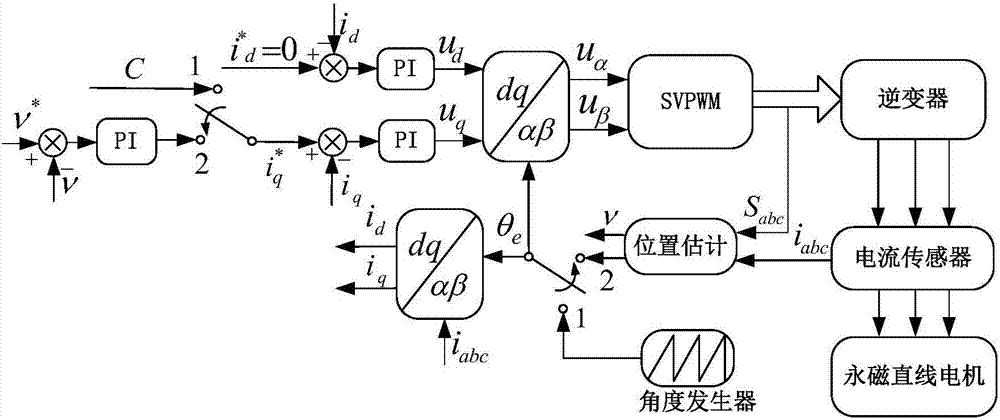
[0057] The specific implementation manner of the present invention will be further described below in conjunction with the accompanying drawings.
[0058] Step 1: Detection and calculation of current and voltage
[0059] Detect the three-phase current i of the permanent magnet linear motor a , i b , i c , and after 3s / 2s (Clark) transformation, the current i in the two-phase stationary coordinate system is obtained α and i β . Detect the voltage of the DC power supply and the three-phase duty cycle, and transform it through 3s / 2s (Clark) to obtain the current u in the two-phase static coordinate system α and u β . The calculation method is as follows,
[0060]
[0061]
[0062] Among them, Sa, Sb, Sc are the duty cycle of the controller output, U dc is the DC bus voltage value.
[0063] Step 2, start-up of the permanent magnet linear motor:
[0064] First put the two switches at 1 contact, and the motor is running at the start-up stage. A constant frequency f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com