An arcgis-based map creation and intelligent vehicle autonomous navigation method and system
A technology for creating intelligent vehicles and maps, which is used in surveying and navigation, navigation, road network navigators, etc., and can solve problems such as affecting the smooth and stable driving trajectory of intelligent vehicles, unable to obtain optimal trajectory, vehicle turning behavior, and increasing the number of map nodes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment 1
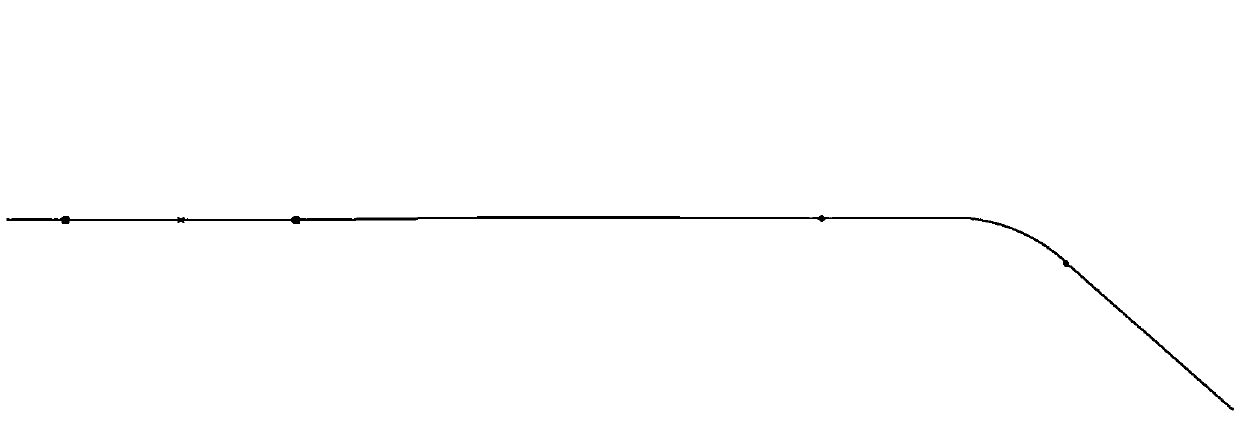
[0088] Using GPS / IMU integrated navigation equipment, according to the collection rules, drive at a constant speed in the center of the lane of the test site to collect data. First import the data text file into an Excel file, then save it in xls format, then import the data in the xls file into ArcGIS, and display it on the map, such as figure 1 As shown in , the black line (composed of very dense black dots) is the original data of the collection route.
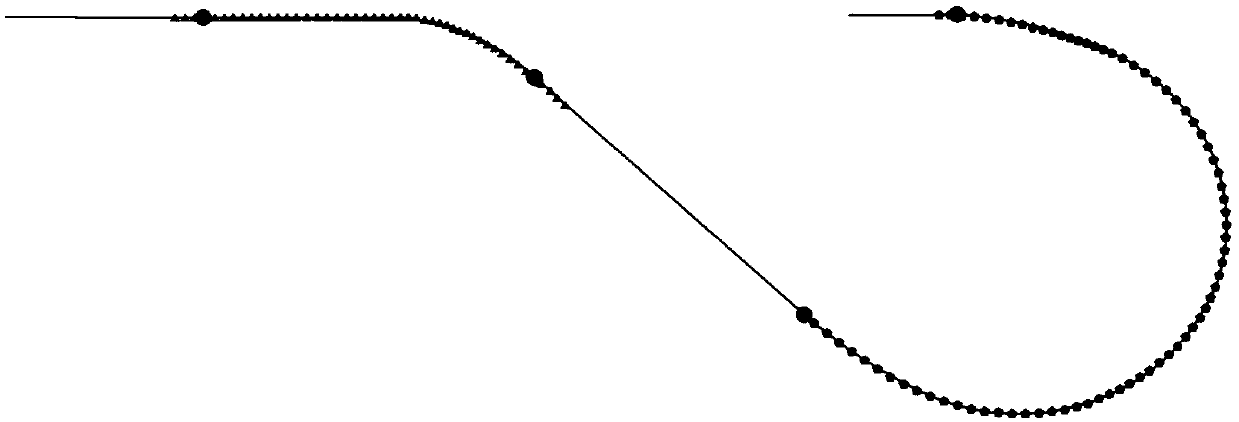
[0089] According to the map drawing method, the test site map will go through the process of general road section > special road section > general road section > special road section > general road section. There are two special road sections, so there are 4 marker points in total; According to the direction of travel, draw the road, first draw the starting point, and then draw the end point, such as figure 2 As shown, the green dot on the left is the starting point of the line, the red dot on the right is the end point, ...
specific Embodiment 2
[0119] An ArcGIS-based map creation and intelligent vehicle autonomous navigation system, including:
[0120] The data acquisition unit, in the area to be navigated, uses the vehicle-mounted GPS acquisition device to drive along all road sections in sequence, collects the latitude and longitude of each point on the road section line, and obtains the GPS information of the corresponding point;
[0121] The map creation unit uses the ArcGIS tool based on the information obtained by the data acquisition unit to create a two-dimensional vector map of the area to be navigated along the data obtained in the same direction of the vehicle, and simultaneously constructs a road fork marking file;
[0122] The path extraction unit uses a path planning tool to obtain a target path, maps the target path to a two-dimensional vector map, and extracts path points;
[0123] The coordinate conversion unit converts the coordinates of the track point in the longitude and latitude into the coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com