


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Underwater navigating and positioning method of AUV (Autonomous Underwater Vehicle) based on SINS/USBL tight combination
A technology of navigation positioning and tight combination, which is applied in the direction of navigation, navigation and positioning through velocity/acceleration measurement, and can solve the problem that the positioning accuracy of the integrated navigation system cannot be guaranteed, the positioning accuracy of the ultra-short baseline is not high, and the matrix offset error, etc. problems, to avoid coordinate conversion errors and matrix offset errors, make up for the accumulation of long-term navigation errors, and avoid the use of
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The technical solutions of the present invention will be described in detail below, but the protection scope of the present invention is not limited to the embodiments.
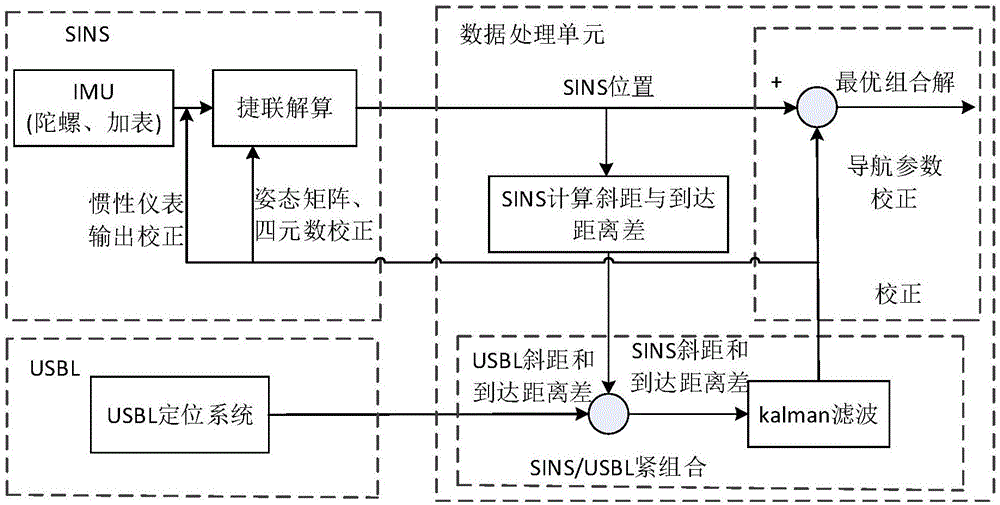
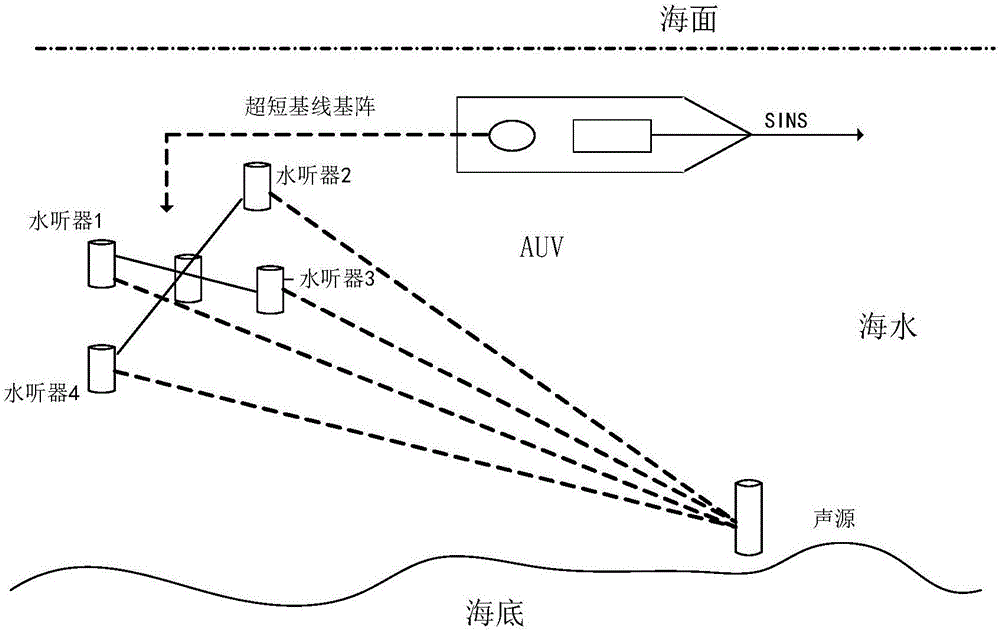
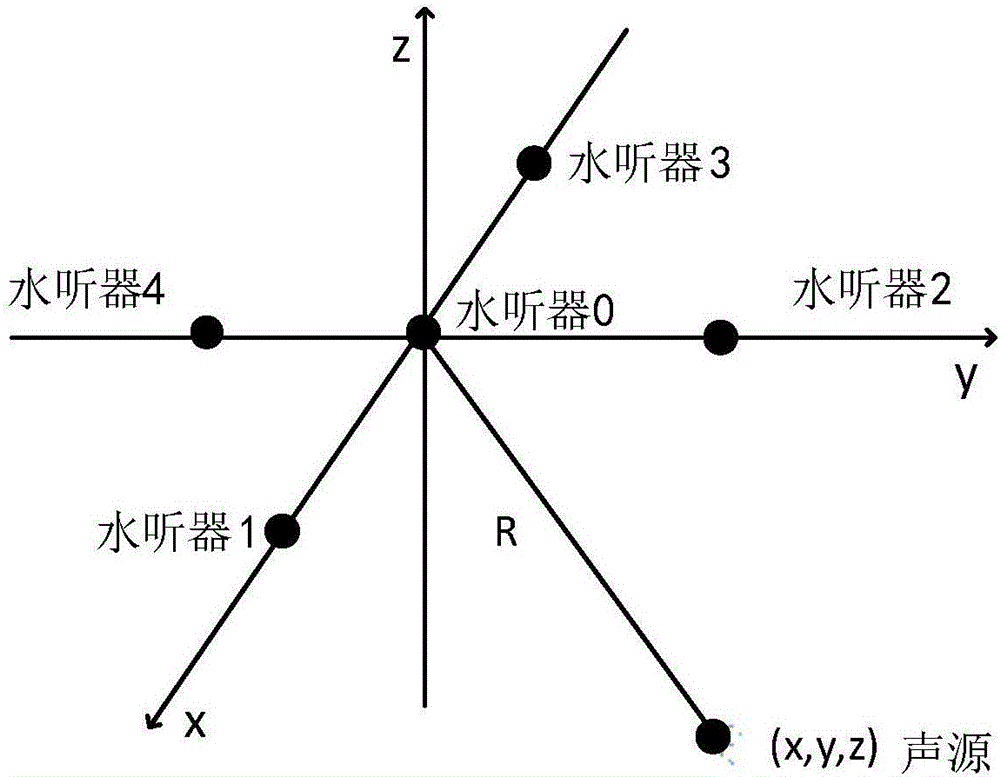
[0042] like figure 1 As shown, the present invention is composed of a strapdown inertial system system SINS and an ultra-short baseline system USBL installed on an AUV. The ultra-short baseline consists of five cross-shaped hydrophone arrays installed on the AUV and sound sources placed on the seabed. The hydrophone arrays are used to receive signals from the sound sources and measure the arrival of the sound waves emitted by the sound sources into the array. The propagation time of the central hydrophone is obtained by weighted cross-correlation in the frequency domain to obtain the time delay difference between the sound wave arriving at the two hydrophones on the coordinate axis of the array.
[0043] Concrete method of the present invention is:
[0044] (1) The ultra-short baseline is composed of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com