A passive dynamic leveling control system of hydraulic press and its control method
A control system and hydraulic press technology, applied in the direction of presses, manufacturing tools, etc., can solve the problems of electro-hydraulic proportional dynamic leveling control system manufacturing, high maintenance costs, poor anti-interference ability, and difficult control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
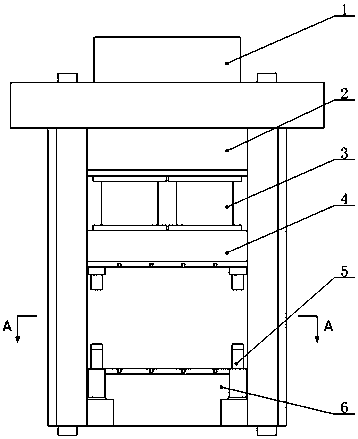
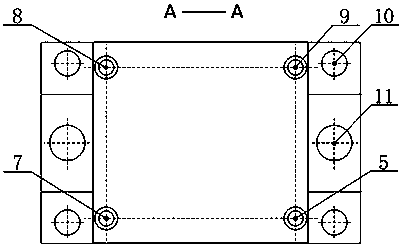
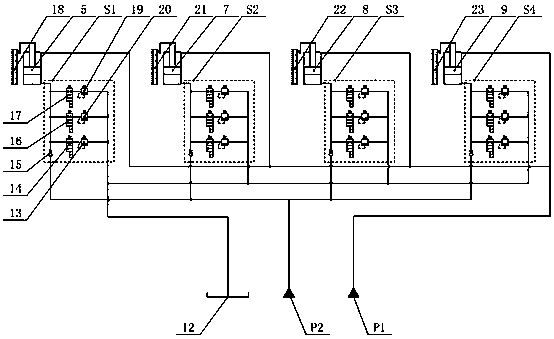
[0056] Such as image 3 As shown, a passive dynamic leveling control system of a hydraulic machine in this embodiment, the hydraulic machine body includes a main system oil tank 1, an upper beam 2, a master cylinder 3, a first leveling hydraulic cylinder 5, and a second leveling hydraulic cylinder 7. The third leveling hydraulic cylinder 8, the fourth leveling hydraulic cylinder 9, the return cylinder 11, the movable beam 4 and the lower beam 6, the main system oil tank 1 is installed on the upper end of the upper beam 2, and the main cylinder 3 and the return cylinder 11 are composed of The main system controls and jointly drives the movable beam 4 to realize reciprocating motion between the upper beam 2 and the lower beam 6, the first leveling hydraulic cylinder 5, the second leveling hydraulic cylinder 7, the third leveling hydraulic cylinde...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com