Object grabbing region positioning method based on point cloud registering
A technology of point cloud registration and area positioning, which is applied in image data processing, instruments, character and pattern recognition, etc., can solve the problem of few practical service robots and achieve excellent performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
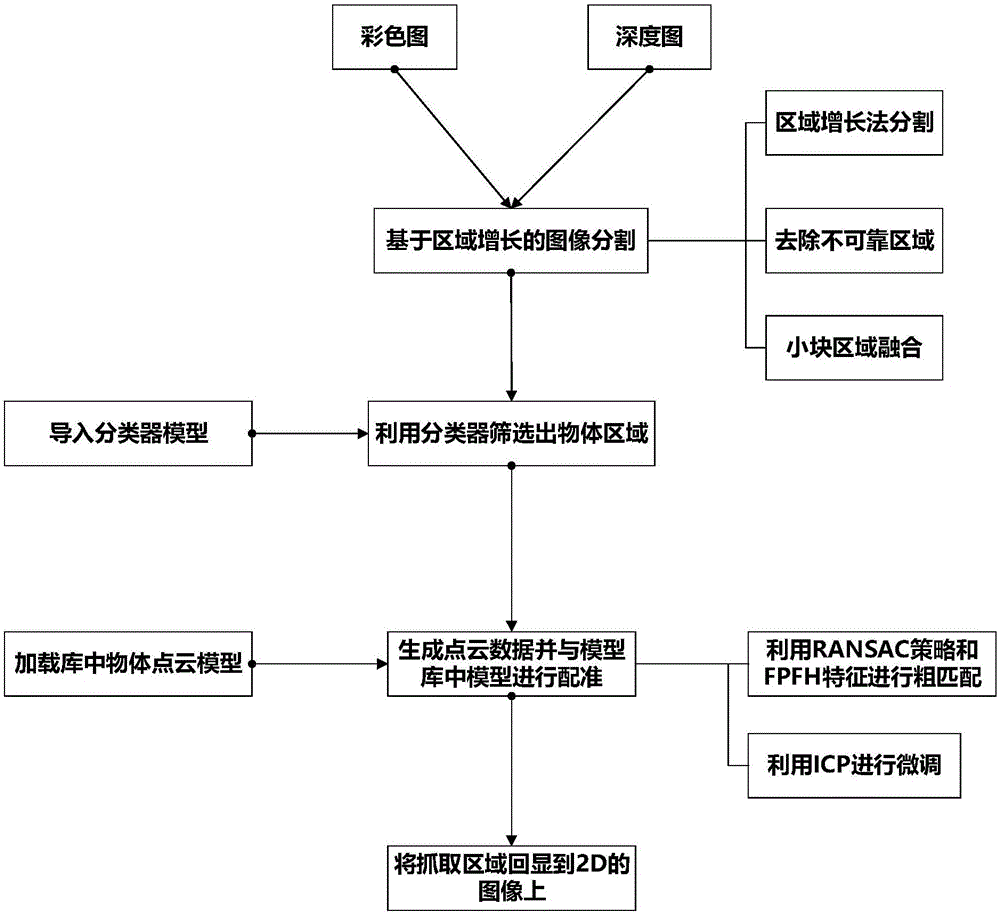
[0035] Such as figure 1 As shown, a method for locating an object grabbing area based on point cloud registration includes the following steps.
[0036] Step 1, the 3D model point cloud library is established.
[0037] 1. First, use a 3D scanner to scan point clouds of various items. The various items here are mainly daily necessities, preferably including cups, teapots, biscuit boxes, cans and Coke bottles. You can choose two or more of them according to your needs, but it can also be other daily necessities.
[0038] 2. Then store the point cloud models Model of various items formed by point cloud scanning in the 3D model point cloud library.
[0039] 3. At the same time, mark the grabbing area for each point cloud model Model in the 3D model point cloud library. The labeling of the grabbing area here can be automatic l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com