A cable-based distance detector and a system based on it for generating robot calibration data
A technology of robots and detectors, applied in general control systems, control/regulation systems, chains for measuring length, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
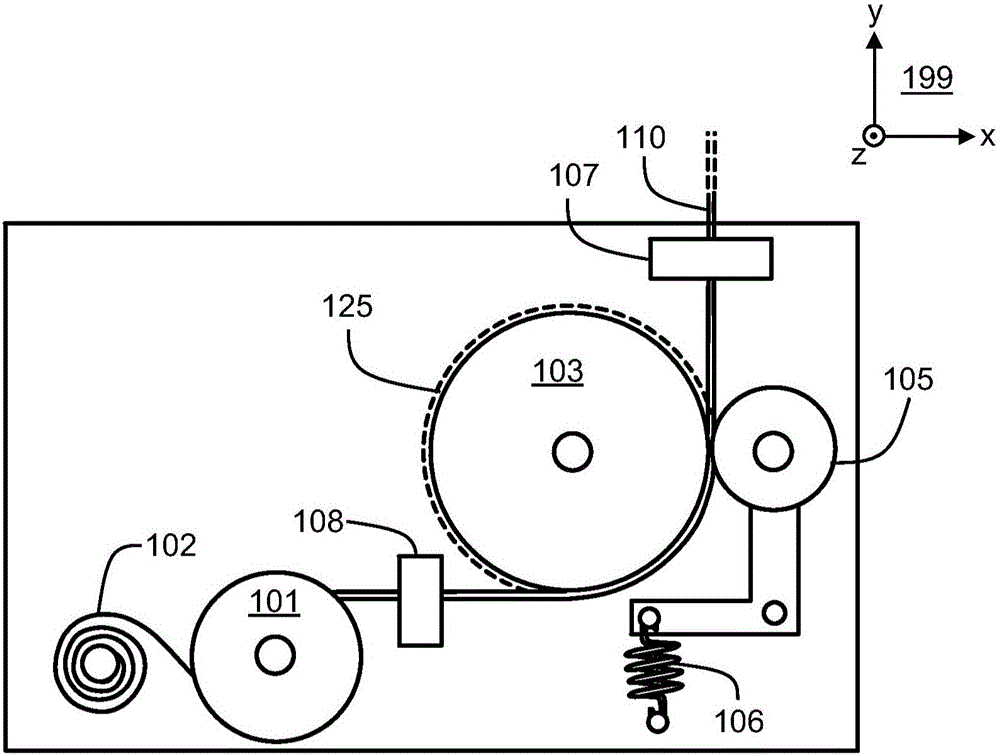
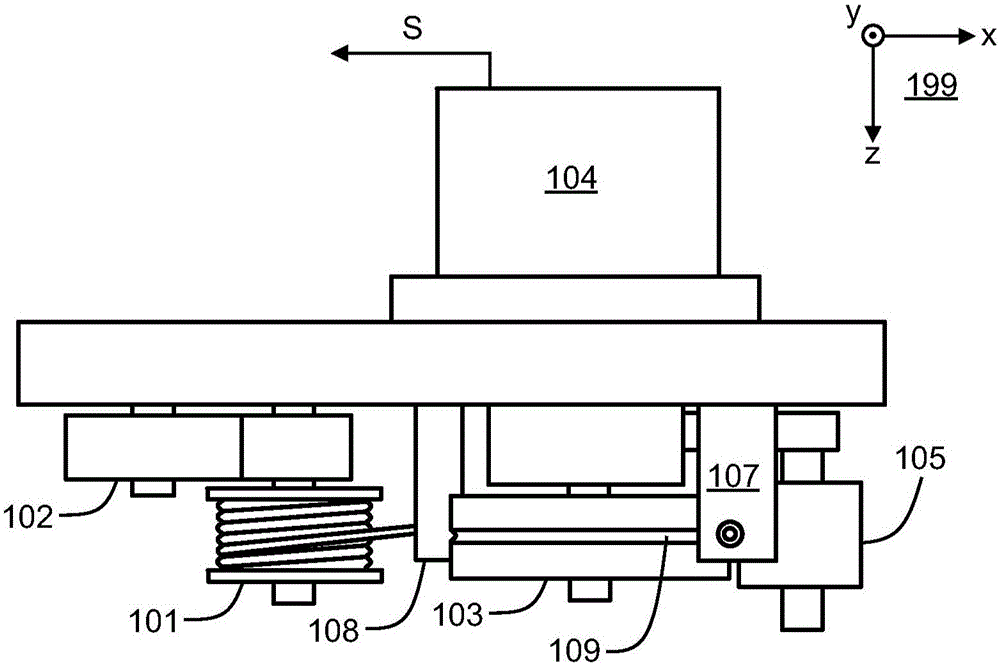
[0035] Figure 1a and Figure 1bshows a schematic illustration of a cable-based distance detector suitable for use in generating kinematic parameters indicative of a robot according to an exemplary and non-limiting embodiment of the present invention. Inaccuracy of biased data systems. The wire based distance detector comprises a winding drum 101 for winding a wire 110 and a torque generator 102 for inducing torque to the winding drum for retrieving the wire. In this exemplary case, torque generator 102 includes a wrap spring that stores mechanical energy when the cable is pulled from the cable-based distance detector cable, and that stores mechanical energy when the cable is allowed to move to the cable-based distance detector cable. When the distance detector is in the winding drum, the cable is wound in it. In principle, it is also possible for the torque generator to comprise, for example, a rotating electrical machine driven with a regulated current. The cable-based di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com