


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Intelligent robot image drawing method and system
An intelligent robot and image rendering technology, applied in the field of image processing, can solve problems such as not being able to meet the high requirements of image rendering speed, and having no good solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
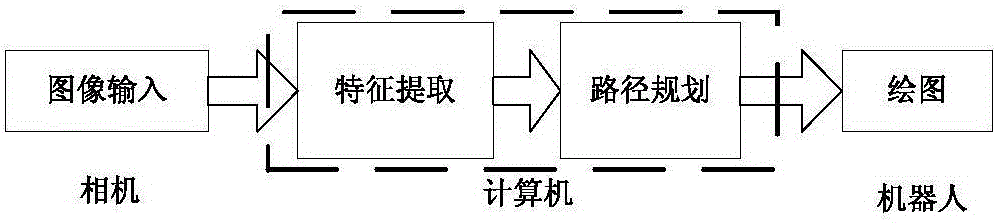
[0142] Aiming at the disadvantages of weak robustness, insufficient reliability and accuracy, and long drawing time in the prior art, the present invention proposes a new robot drawing method to demonstrate the intelligence of the robot. In order to extract image features, the present invention proposes a feature extraction method based on a mixture of global binarization and local binarization techniques; An optimal path planning method is proposed to generate the optimal path for drawing a picture.
[0143] figure 2 It is the overall framework of the robot portrait system proposed by the present invention. Among them, the input image is a color photo taken by a camera. However, the drawn image is a black and white image, and the drawing process is time-consuming, so the drawn image should be as concise as possible. Therefore, features that can express the source image must be extracted. The features extracted by the present invention refer to some closed areas that can ...
no. 2 example
[0205] In order to verify the effect of the method of the present invention, the present invention proposes Figure 7 The experimental system shown is used for experimental verification. Such as Figure 7 As shown, the experimental system includes a camera and an ABB IRB120 industrial robot equipped with a marker pen. The markers are attached to the robot through a specially designed container that contains a spring that allows the markers to move more smoothly across the paper. The feature extraction and path planning algorithms are implemented using C#, and the corresponding programs run on a laptop.
[0206] The specific process of this embodiment is as follows:
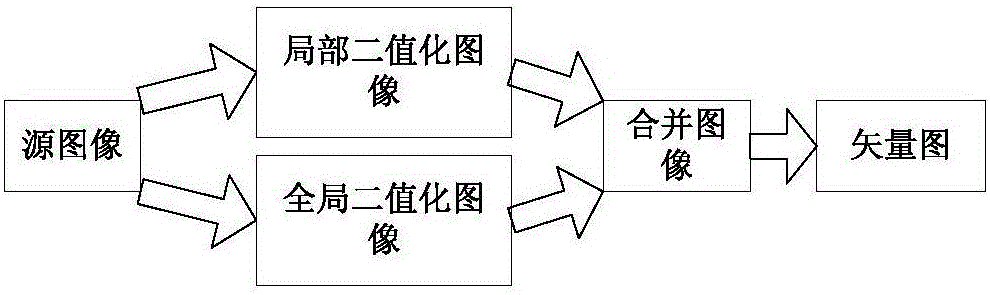
[0207] (1) Feature extraction
[0208] The output of each step of feature extraction is as Figure 8 A-E are shown. Wherein, the source image A is a photo after face extraction using the OpenCV program; Figure 8 B and C are the results of local binarization and global binarization respectively, and the par...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com