


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robot wheelchair vehicle
A wheelchair and robot technology, which is applied to patient chairs or special transportation tools, vehicle rescue, medical transportation, etc. It can solve the problems of heavy wheelchair operation, single wheelchair function, poor emergency effect, etc., and achieve convenient shipping and carrying. , Simple operation, flexible use of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
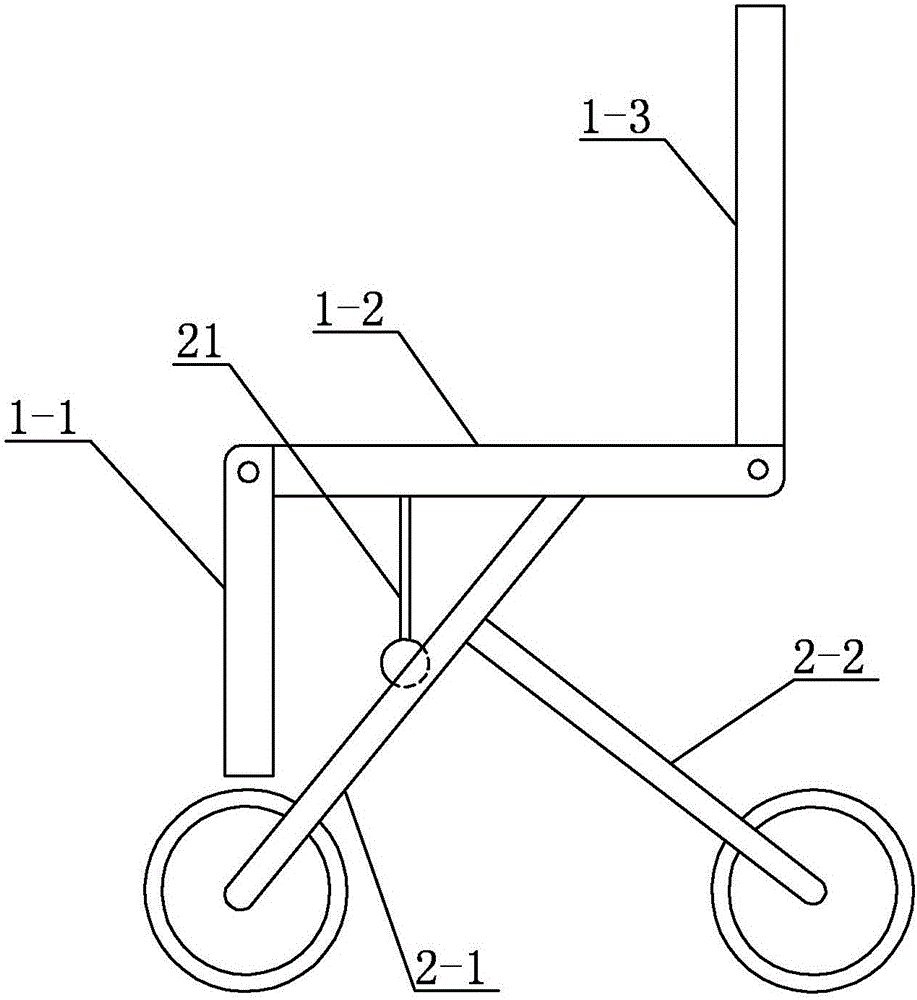
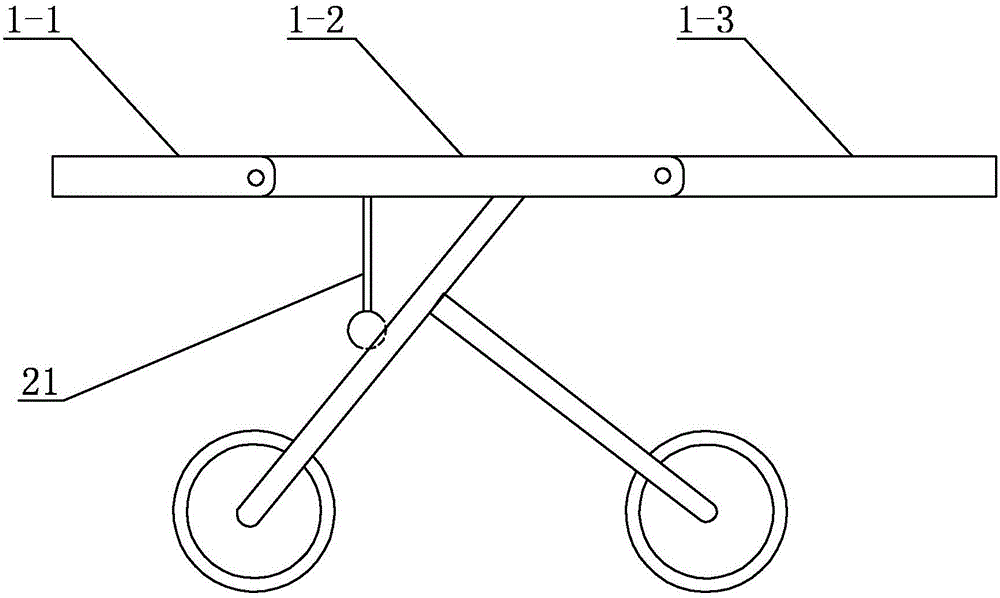
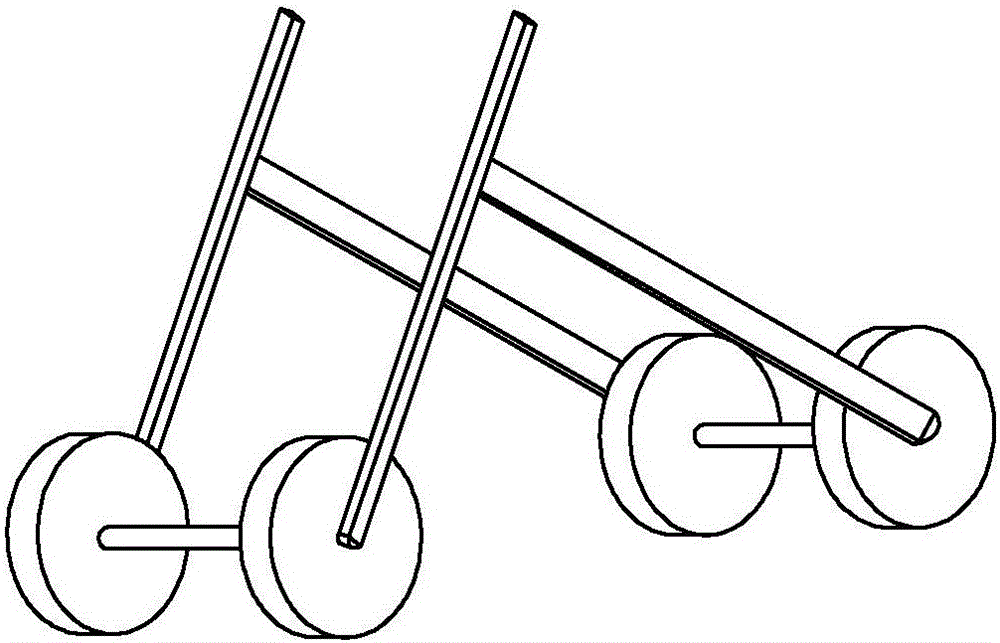
[0041] Specific implementation mode one: combine figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 , Figure 9 , Figure 10 , Figure 11 , Figure 12 , Figure 13 , Figure 14 , Figure 15 , Figure 16 , Figure 17 and Figure 18 Describe this embodiment, which includes a power transmission system, an angle sensing system, a load-bearing deformation system, a leg movement system and four road wheel assemblies;
[0042] The power transmission system includes a power supply, a total motor and two sub-motors 19;
[0043] Described angle sensing system comprises controller, end sensor, angle displacement sensor and four groups of electromagnets 8, and described controller, end sensor, angle displacement sensor and four groups of electromagnets 8 are all connected with power supply, control The controller is connected with the sub-motor 19 respectively; the controller is connected with the end sensor, the angular displaceme...
specific Embodiment approach 2
[0050] Specific implementation mode two: combination figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 and Figure 16 Describe this embodiment, in this embodiment, when the ratchet assembly is a straight elastic pawl assembly 4, the pawl assembly is set correspondingly to the electromagnet 8, and the traveling wheel assembly includes a hub 3 and a direct elastic pawl assembly 4. The direct elastic pawl assembly 4 and its corresponding group of electromagnets 8 are all arranged in the hub 3, the direct elastic pawl assembly 4 includes a plurality of direct elastic pawl monomers, and the circumferential end surface of the wheel hub 3 is processed with A plurality of first through-holes 9 that are arranged in one-to-one correspondence with the direct-elastic pawl monomers, and a plurality of direct-elastic pawl monomers are evenly distributed on a corresponding group of electromagnets 8, and each direct-elastic pawl single The body includes a ...
specific Embodiment approach 3
[0051] Specific implementation mode three: combination figure 1 , figure 2 , image 3 , Figure 4 , Figure 8 , Figure 9 and Figure 16 This embodiment is described. In this embodiment, when the pawl assembly is a prostrate pawl assembly 10, the pawl assembly is correspondingly arranged with the electromagnet 8, and the traveling wheel assembly includes a hub 3 and a prostrate pawl assembly 10. The electromagnet 8 corresponding to the prostrate pawl assembly 10 is arranged in the hub 3. The prostrate pawl assembly 10 includes an auxiliary support frame 20 and a plurality of prostrate pawl monomers. A second through hole 11 corresponding to the prostrate pawl monomer one by one, a plurality of crouching pawl monomers are evenly distributed on its corresponding electromagnet 8, each prostrate pawl monomer includes The second spring 12, the second support rod 13 and the second end support block 14, the auxiliary support frame 20 is coaxially arranged with the wheel hub 3,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com