Swimming micro robot driven by both rotating magnetic field and magnetic gradient, and driving device and method thereof
A technology of micro-robots and rotating magnetic fields, applied in the direction of micro-manipulators, manipulators, program-controlled manipulators, etc., can solve the problems of single driving mode and single adaptation to the environment, and achieve the effect of flexible driving mode
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
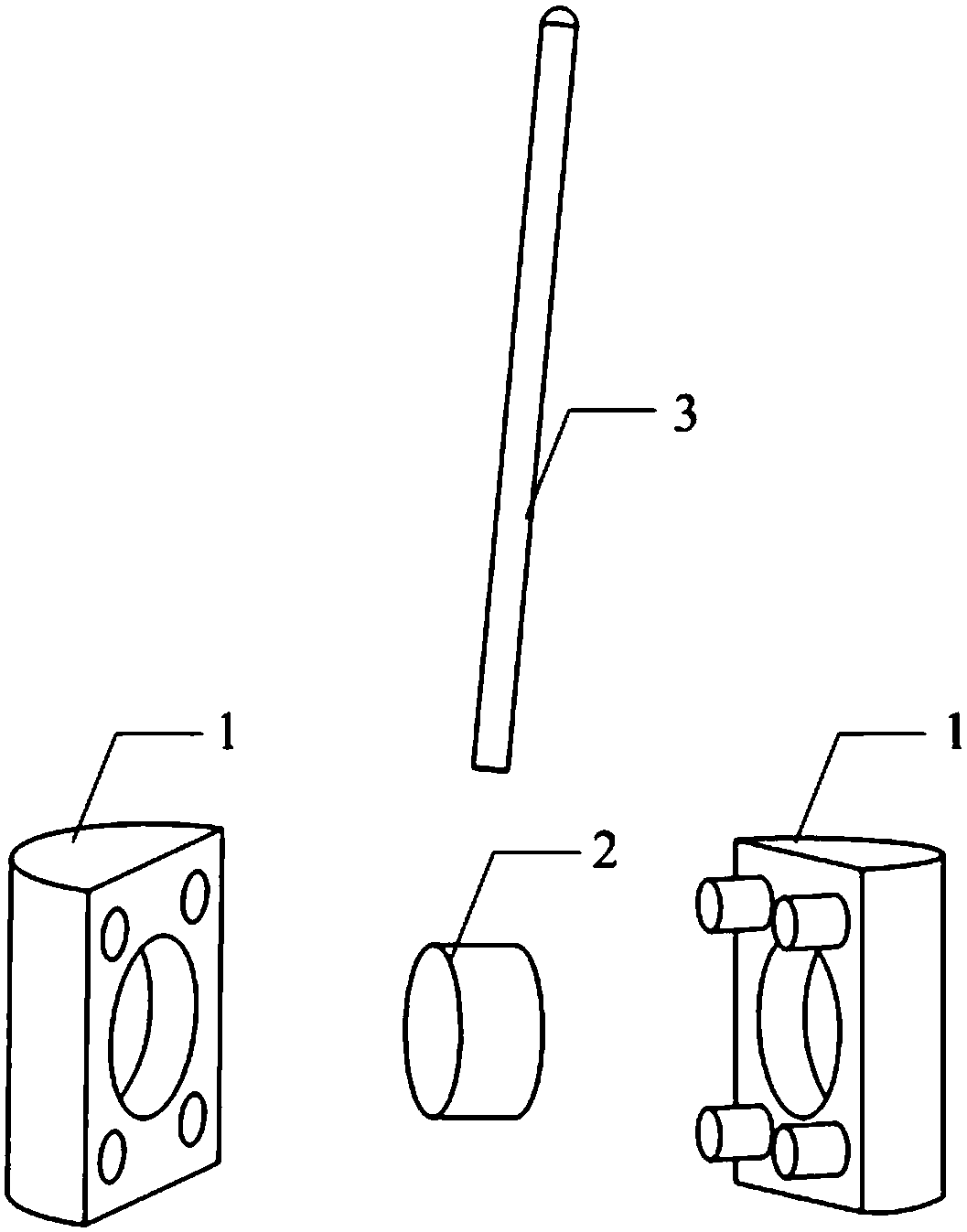
[0035] Specific embodiment one: reference figure 1 with figure 2 To describe this embodiment in detail, a swimming micro-robot with dual propulsion of rotating magnetic field and magnetic gradient described in this embodiment, the swimming micro-robot includes: a housing 1, a cylindrical magnet 2 and a compliant flagella 3;
[0036] The shell 1 is a cylindrical structure with a hollow inner cavity. One end of the compliant flagella 3 is fixed at the center of an end surface of the shell 1, and the center axis of the shell 1 coincides with the center axis of the compliant flagella 3.
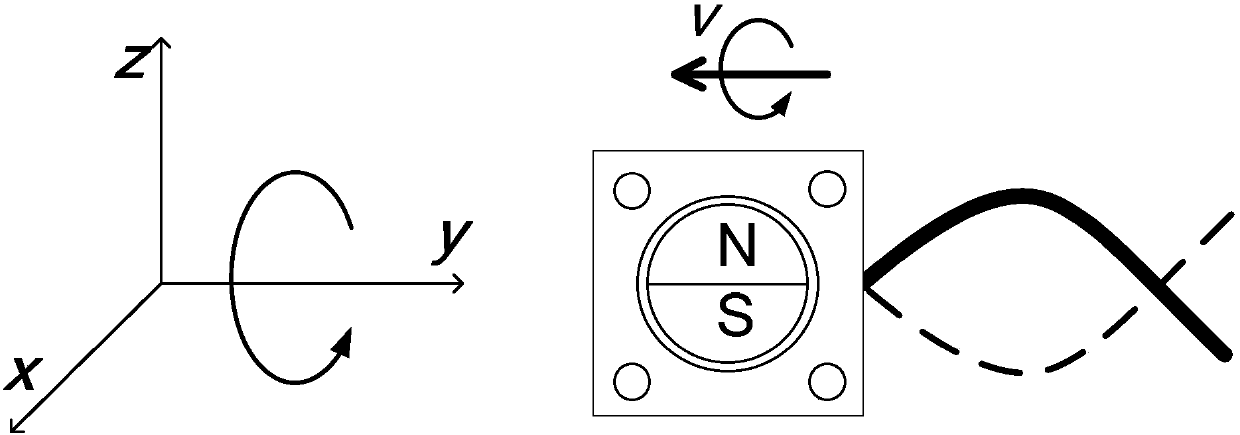
[0037] The cylindrical magnet 2 is located inside the hollow cavity of the housing 1, and the central axis of the cylindrical magnet 2 and the central axis of the housing 1 are perpendicular to each other,
[0038] The magnetization direction of the cylindrical magnet 2 is the radial direction.
[0039] The swimming micro-robot with dual propulsion of rotating magnetic field and magnetic gradient describ...
specific Embodiment approach 2
[0040] Embodiment 2: This embodiment further explains the swimming micro-robot with dual propulsion of rotating magnetic field and magnetic gradient as described in Embodiment 1. In this embodiment, the material of the cylindrical magnet 2 is neodymium iron boron. The diameter is 3mm and the height is 1.5mm.
specific Embodiment approach 3
[0041] Specific embodiment three: This embodiment is a further description of a swimming micro-robot with dual propulsion of rotating magnetic field and magnetic gradient described in specific embodiment 1. In this embodiment, the housing 1 includes: component one and component two ,
[0042] The first part and the second part are in an axisymmetric structure, the symmetry axis is the central axis of the housing 1, and the first part and the second part can be separated or fastened to each other through a connecting piece.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com