Multi-source inertial navigation information reasonability determination method
A technology of inertial navigation and discrimination method, which is applied in the field of integrated navigation and inertial-satellite integrated navigation, and can solve problems such as navigation errors and wrong inertial navigation information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
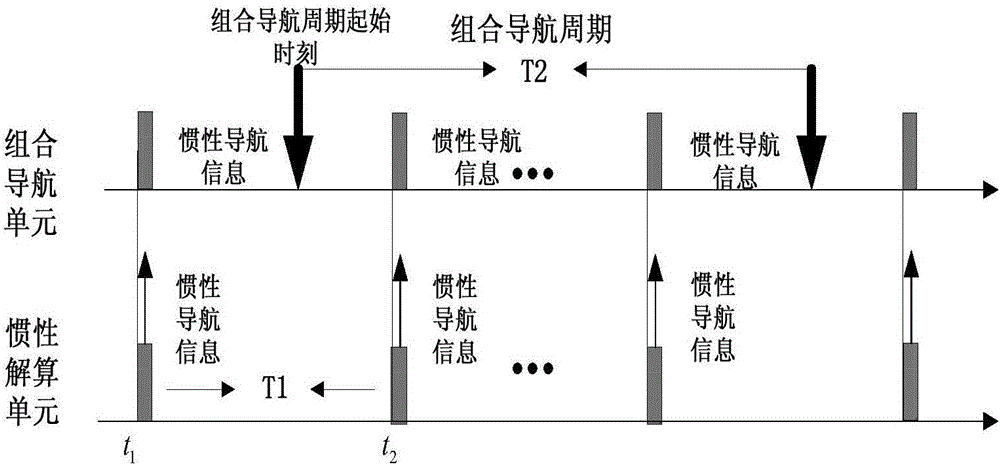
[0083] An integrated navigation system is equipped with three inertial calculation units 1-3 (Process Unit, PU1, PU2, PU3 for short), and the integrated navigation software runs on the integrated navigation unit.
[0084] Time period T1 = 10ms (milliseconds), time period T2 = 100ms, a certain T1 period start time t 1 =0.02s, end time t 2 =0.03s,t gap =0.006s, it can be calculated that the starting time of integrated navigation is 0.024s.
[0085] t 1 The inertial navigation information of the three inertial calculation units recorded by the time-integrated navigation is as follows:
[0086] PU1:
[0087] Communication is normal;
[0088] Inertial information self-contained status flag = 1 (1 means normal);
[0089] (x a ,y a ,z a )=(10.0,20.0,30.0)
[0090] (V x_a ,V y_a ,V z_a )=(1.0,2.0,3.0)
[0091] q a → = ( q 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com