Vision-based navigation and positioning control method for transformer substation inspection robot
An inspection robot and control method technology, applied in two-dimensional position/channel control, non-electric variable control, vehicle position/route/altitude control and other directions, can solve manual laying, low GPS navigation accuracy, poor stability, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0041] The vision-based substation inspection robot navigation positioning control method of the present invention, the steps are:
[0042] S1: Pre-set the navigation path and docking location identification, and the inspection robot automatically recognizes the inspection path and docking location through machine vision.
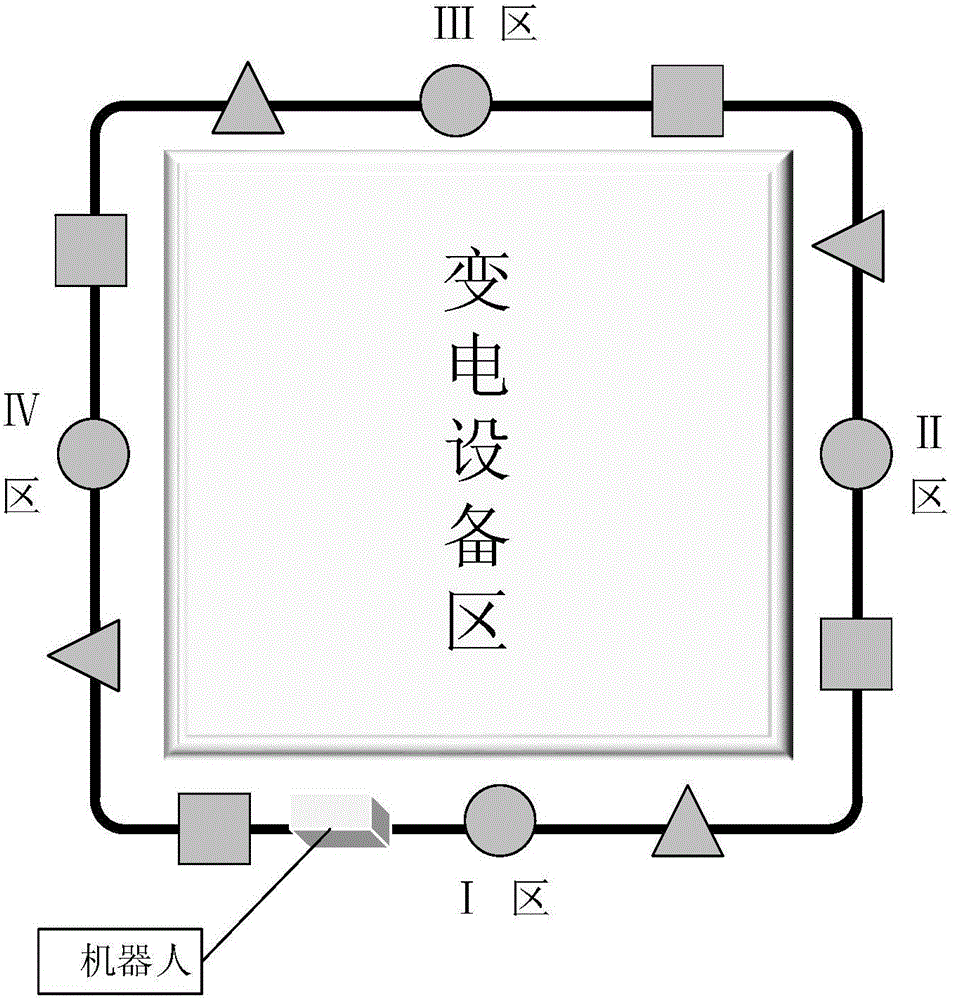
[0043] The robot carries out inspection according to the visual navigation marking line, and the present invention lays the navigation marking line (such as a yellow marking line with a width of 150mm) in the substation road. The robot patrols the substation from the starting point and returns to the starting point. The robot can adapt to the substation's actual narrow terrain and sharp bends to realize path planning.
[0044] The present invention further sets marking points of different shapes on the marking lin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com