Autonomous cruising method of mobile robot for reliable wifi connection
A mobile robot, robot technology, applied in two-dimensional position/channel control, instruments, navigation and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0061] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, should be understood that these examples are only for illustrating the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various aspects of the present invention All modifications of the valence form fall within the scope defined by the appended claims of the present application.
[0062] A mobile robot autonomous cruising method for reliable WIFI connection, comprising the following steps:
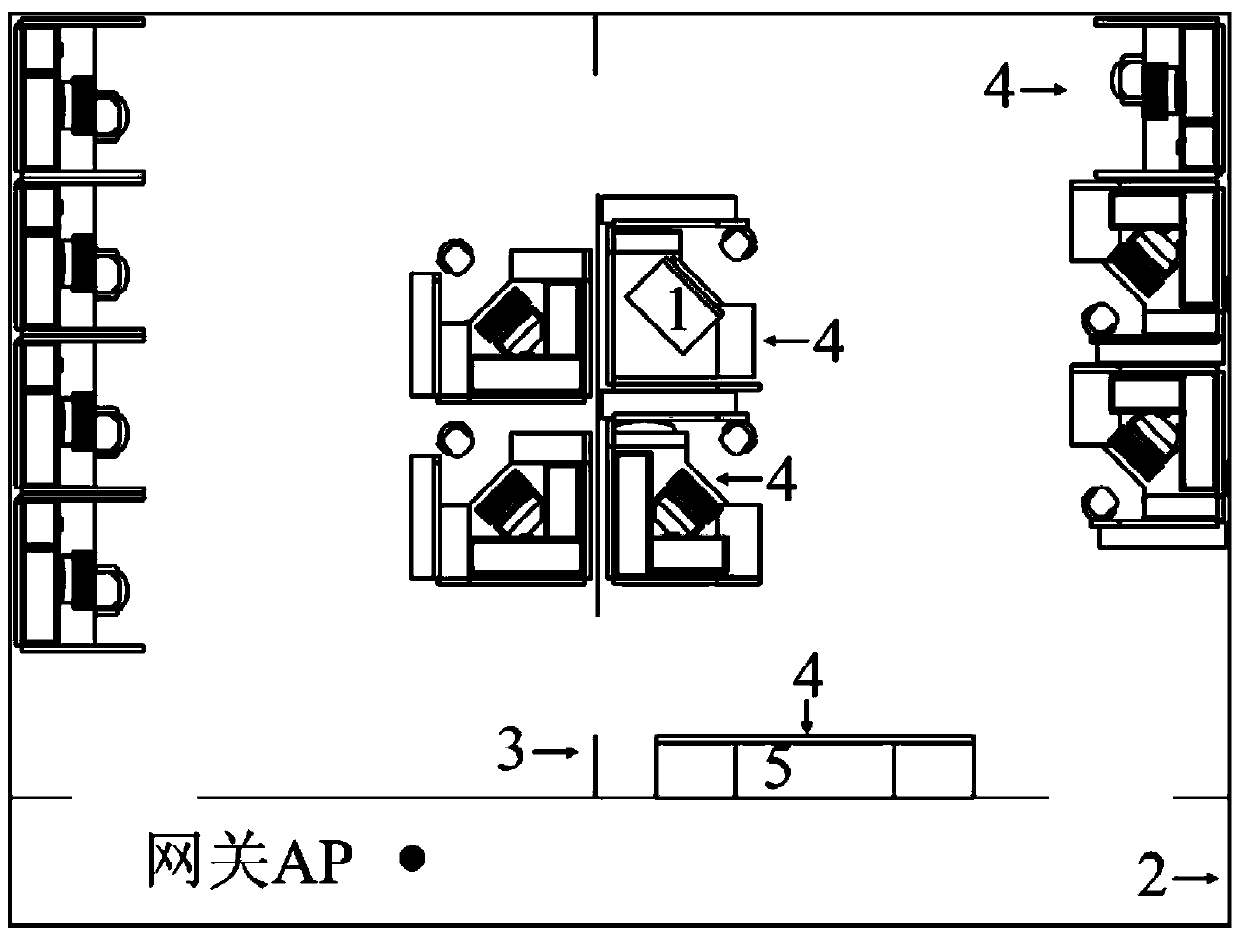
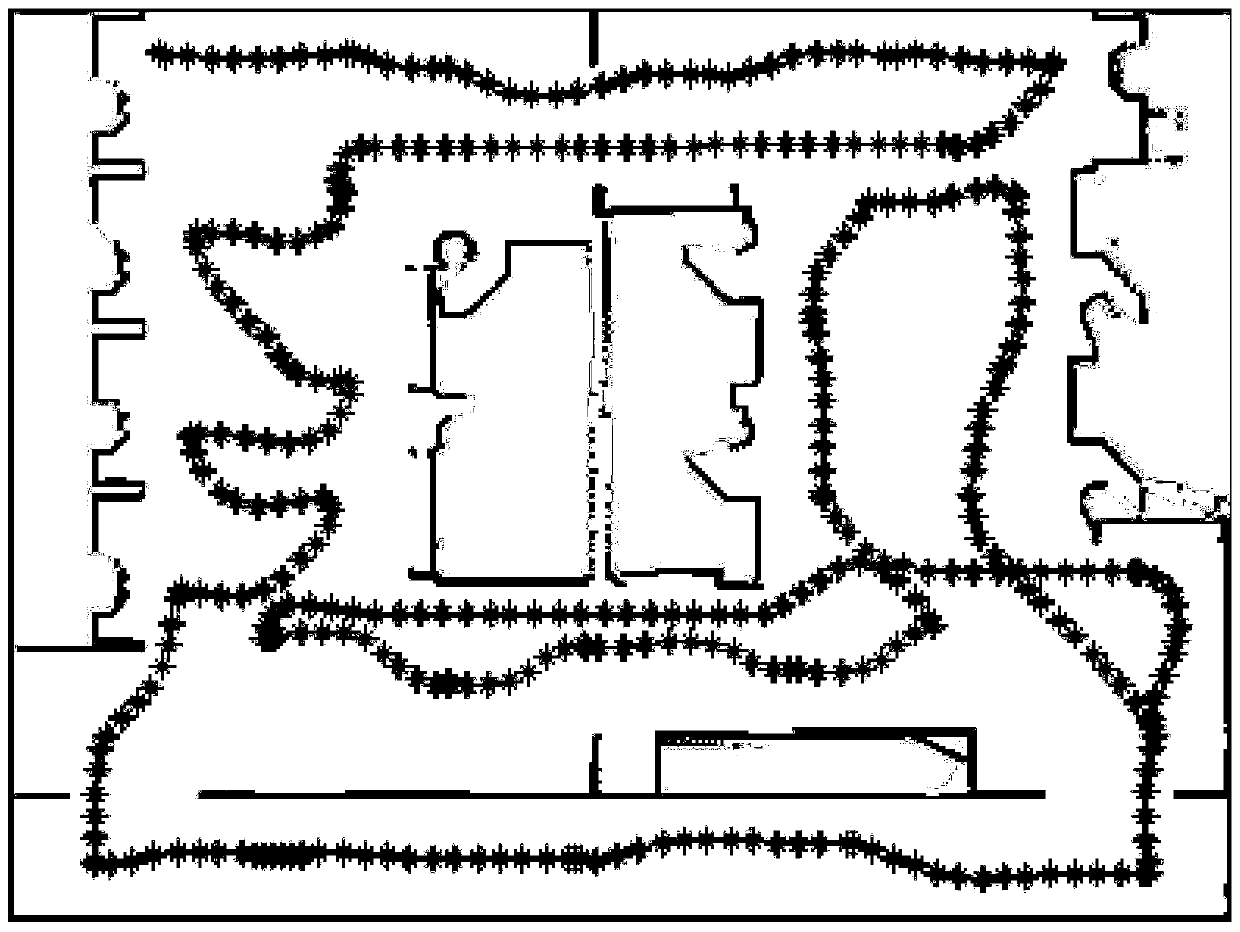
[0063] Step 1. For the unknown environment, the robot traverses the entire unknown environment through autonomous exploration and navigation, and establishes a hybrid map of the grid map of environmental obstacles and the distribution of WIFI signal strength. The hybrid map is the WIFI map.
[0064] During the creation of the WIFI map, the WIFI module of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com