Wearable DOF (dual degrees of freedom) elbow rehabilitation training device
A rehabilitation training and degree of freedom technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of inconvenient addition of elbow joint drive, low precision and efficiency, poor adaptability, etc., and achieve good coincidence, high precision, and stability good sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
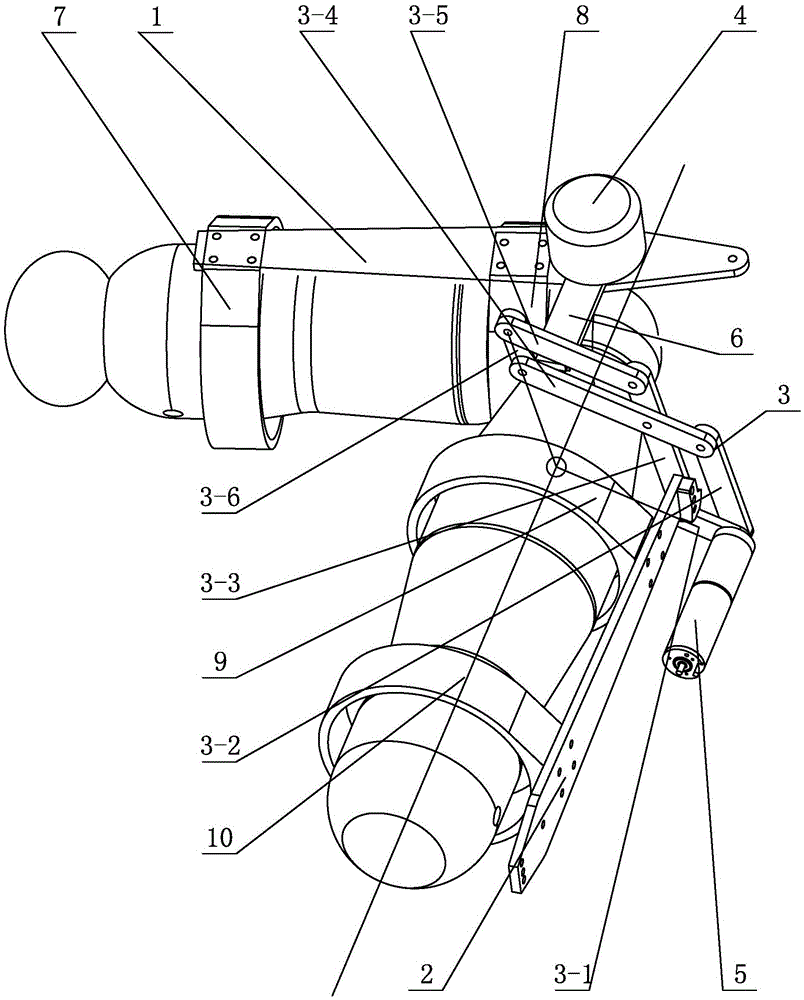
[0011] Specific implementation mode one: combine figure 1 and figure 2 Describe this embodiment, a wearable two-degree-of-freedom elbow rehabilitation training device described in this embodiment includes a forearm 1, a large arm 2, a connecting rod assembly 3, a first motor 4, a second motor 5 and a connecting plate 6 , the first motor 4 is installed on one end of the small arm 1, one end of the connecting plate 6 is connected with the rotation shaft of the first motor 4, the other end of the connecting plate 6 is connected with one end of the boom 2 through the link assembly 3, and the second motor The rotating shaft of 5 is connected with connecting rod assembly 3.
[0012] In this embodiment, the first connecting rod 3-1, the second connecting rod 3-2, the third connecting rod 3-3, the fourth connecting rod 3-4, the fifth connecting rod 3-5, and the sixth connecting rod 3- 6 correspond to image 3 Among the six connecting rods AO, AB, OD, BF, DE, and EF, the intersecti...
specific Embodiment approach 2
[0013] Specific implementation mode two: combination figure 1 and figure 2 Describe this embodiment, a wearable two-degree-of-freedom elbow rehabilitation training device described in this embodiment is characterized in that the link assembly 3 includes a first link 3-1, a second link 3-2, a second Three connecting rods 3-3, the fourth connecting rod 3-4, the fifth connecting rod 3-5 and the sixth connecting rod 3-6, one end of the first connecting rod 3-1 and one end of the second connecting rod 3-2 connection, the other end of the second connecting rod 3-2 is connected with one end of the fourth connecting rod 3-4, the other end of the fourth connecting rod 3-4 is connected with one end of the sixth connecting rod 3-6, and the sixth connecting rod The other end of 3-6 is connected with an end of the fifth connecting rod 3-5, the other end of the fifth connecting rod 3-5 is connected with one end of the third connecting rod 3-3, and the other end of the third connecting rod...
specific Embodiment approach 3
[0014] Specific implementation mode three: combination figure 1 and figure 2 To illustrate this embodiment, a wearable two-degree-of-freedom elbow rehabilitation training device described in this embodiment also includes a first strap 7, a second strap 8, a third strap 9, and a fourth strap 10. The first strap 7 and the second strap 8 are arranged side by side on the inner side of the small arm 1 , and the third strap 9 and the fourth strap 10 are arranged side by side on the inner side of the big arm 2 . Other components and connections are the same as those in the first embodiment.
[0015] working principle
[0016] The upper arm 2 of the exoskeleton and the forearm 1 are connected through the connecting rod assembly 3, the first connecting rod 3-1 is fixedly connected to the upper arm 2, the sixth connecting rod is fixedly connected to the forearm 1, and the first connecting rod 3-1 is fixedly connected to the The intersection point G of the rod 3-1 and the sixth conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com