A method to realize rapid processing and retrieval of spatial big data
A data and space technology, applied in the field of realizing the rapid processing of spatial big data and the retrieval of the above image, to achieve the effects of high practicability and intelligence, fast retrieval, and great practical value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
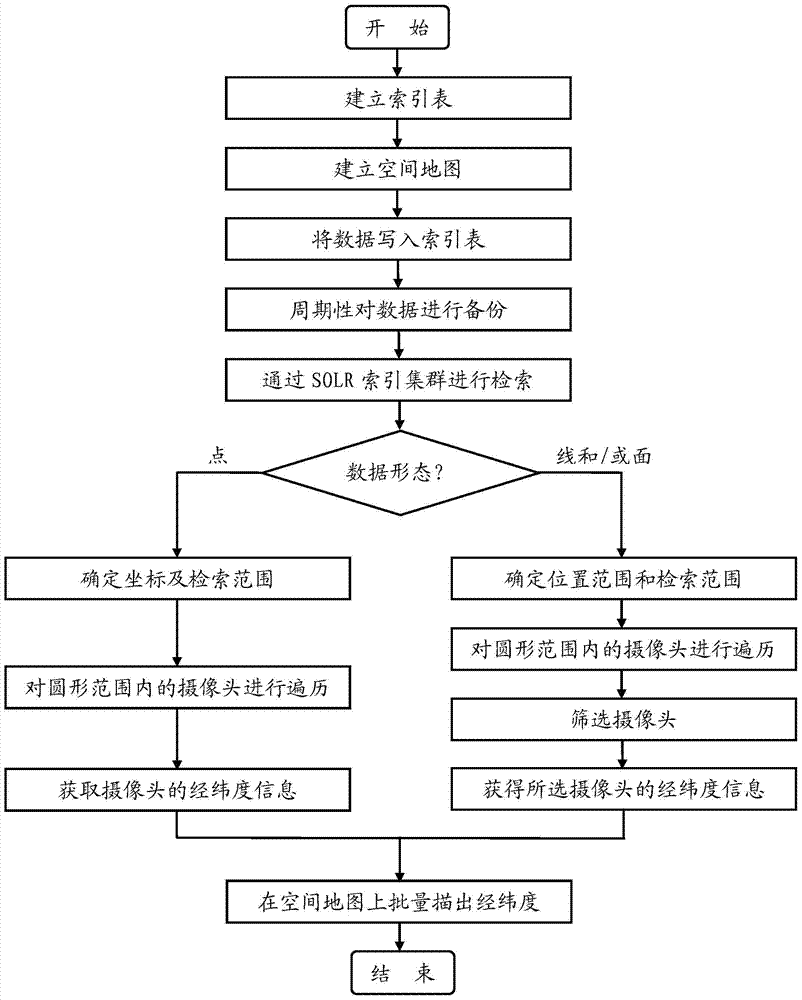
[0049] like figure 1 Shown, the present invention comprises the following steps:
[0050] S1. Establish index tables and spatial maps;
[0051] S2. From the public security internal database, respectively import the elements identical to the field of the index table into the field in the index table;
[0052] S21. Periodically back up the data;
[0053] S3. Use SOLR to index clusters and search according to query conditions:
[0054] S31. Perform word segmentation on the query condition to determine the data form of the query condition;
[0055] S311. Establishing a thesaurus as a basis for word segmentation of query conditions;
[0056] S312. Split the query condition by words;
[0057] S313. Match the split words with the words in the thesaurus, the words that can be matched are word segmentation results, and those that cannot be matched are discarded;
[0058] S32. If the query condition is point-shaped data, the following steps are included:
[0059] S321. Find the ...
Embodiment 2
[0083] This embodiment is similar to Embodiment 1, the only difference is that the retrieval condition is data in line form:
[0084] If the query condition is data in the form of a line, such as "Wen'er Road", it can be determined as the retrieval condition of line form after matching in the thesaurus, then first draw the route of Wen'er Road on the spatial map, and use 50 m is the search range; secondly, take each coordinate point on Wen'er Road as the center of the circle, and use 50 meters as the radius to search the existing cameras in the formed circular range, and traverse all the cameras; then, screen out the coordinate points that fall within The cameras within the monitoring range of the cameras; finally, remove the duplicated cameras with the selected camera, and obtain the latitude and longitude information of all the cameras on Wen'er Road that can be monitored.
Embodiment 3
[0086] This embodiment is similar to Embodiment 1, the only difference is that the retrieval condition is the data of surface form:
[0087] If the query condition is the data of the surface shape, such as "West Lake District", it can be determined as the retrieval condition of the surface shape after matching the thesaurus, then firstly draw the surface area of the West Lake District on the spatial map, and use 50 meters is the search range; secondly, take each coordinate point on the West Lake District as the center of the circle and 50 meters as the radius, search for existing cameras in the formed circular range, and traverse all cameras; then, screen out the coordinate points that fall on the camera Cameras within the monitoring range; finally, remove duplicate cameras with the selected camera, and obtain the latitude and longitude information of all cameras in the West Lake District that can be monitored.
[0088] Compared with the prior art, the present invention has ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com