Laser-point-cloud-based urban road identification method and apparatus
A laser point cloud, road recognition technology, applied in the field of intelligent transportation, can solve the problems of low object recognition efficiency, large error, low efficiency of road model construction, etc., to improve the construction efficiency and accuracy, and improve the recognition efficiency and accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
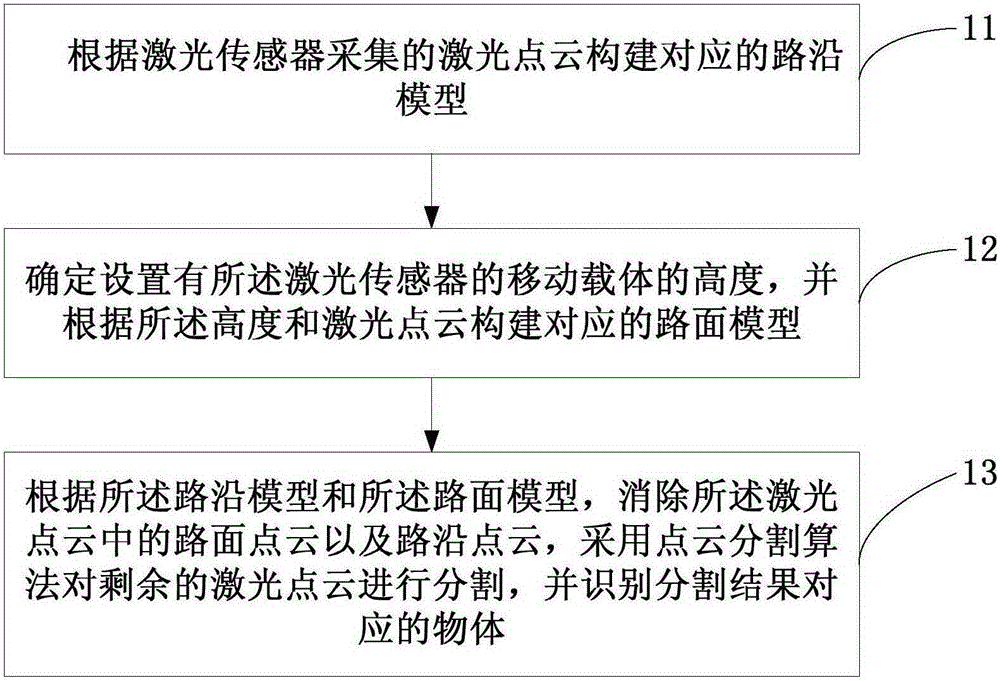
[0023] figure 1 It is a schematic flowchart of a laser point cloud-based urban road recognition method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of identifying objects contained in urban roads based on laser point clouds. see figure 1 The method for identifying urban roads based on laser point clouds provided in this embodiment specifically includes the following:
[0024] S11. Construct a corresponding roadside model according to the laser point cloud collected by the laser sensor.
[0025] In this embodiment, the laser sensor can be a laser radar arranged on a mobile carrier, the mobile carrier can usually be a vehicle, and the laser point cloud can be a feature point set of the environment where the mobile carrier is located, including the coordinates and reflectance of each feature point, The reflectivity can be an integer from 0 to 255.
[0026] Exemplarily, the laser radar collects the laser point cloud, and the...
Embodiment 2
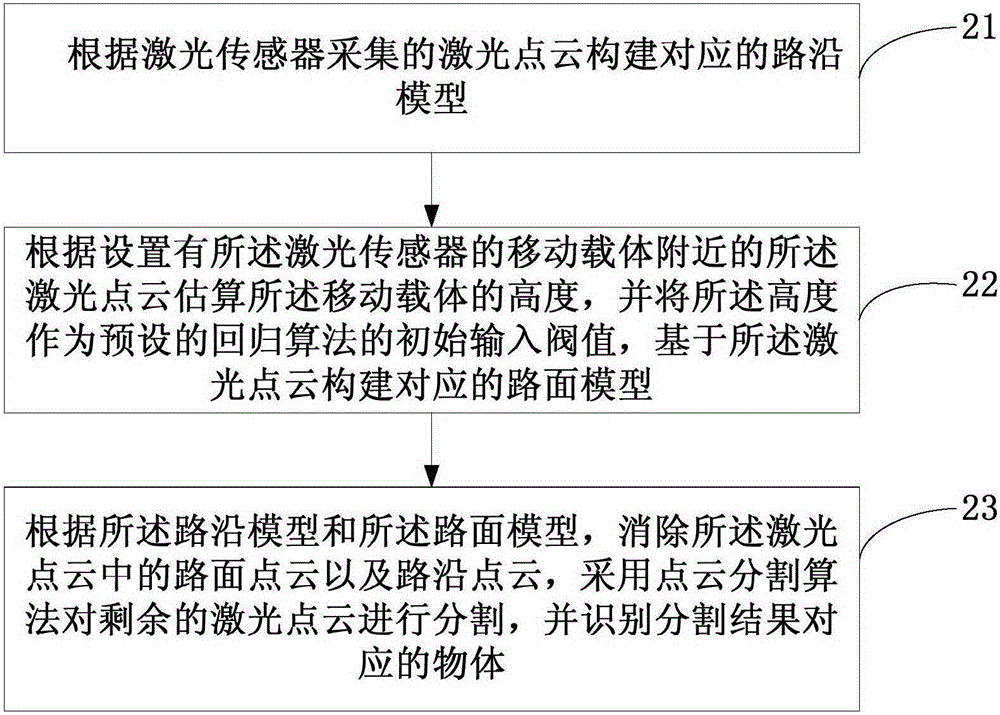
[0034] This embodiment provides a new urban road recognition method based on laser point cloud on the basis of the above embodiments, and this method further limits the construction methods of the roadside model and the road surface model. figure 2 It is a schematic flowchart of a laser point cloud-based urban road recognition method provided by Embodiment 2 of the present invention. see figure 2 The method for identifying urban roads based on laser point clouds provided in this embodiment specifically includes the following:
[0035] S21. Construct a corresponding roadside model according to the laser point cloud collected by the laser sensor.
[0036] Optionally, constructing a corresponding roadside model based on the laser point cloud collected by the laser sensor may specifically include: using a corner point detection algorithm to identify the laser point cloud to obtain the roadside corner corresponding to the laser point cloud; The curb corner points of the road cu...
Embodiment 3
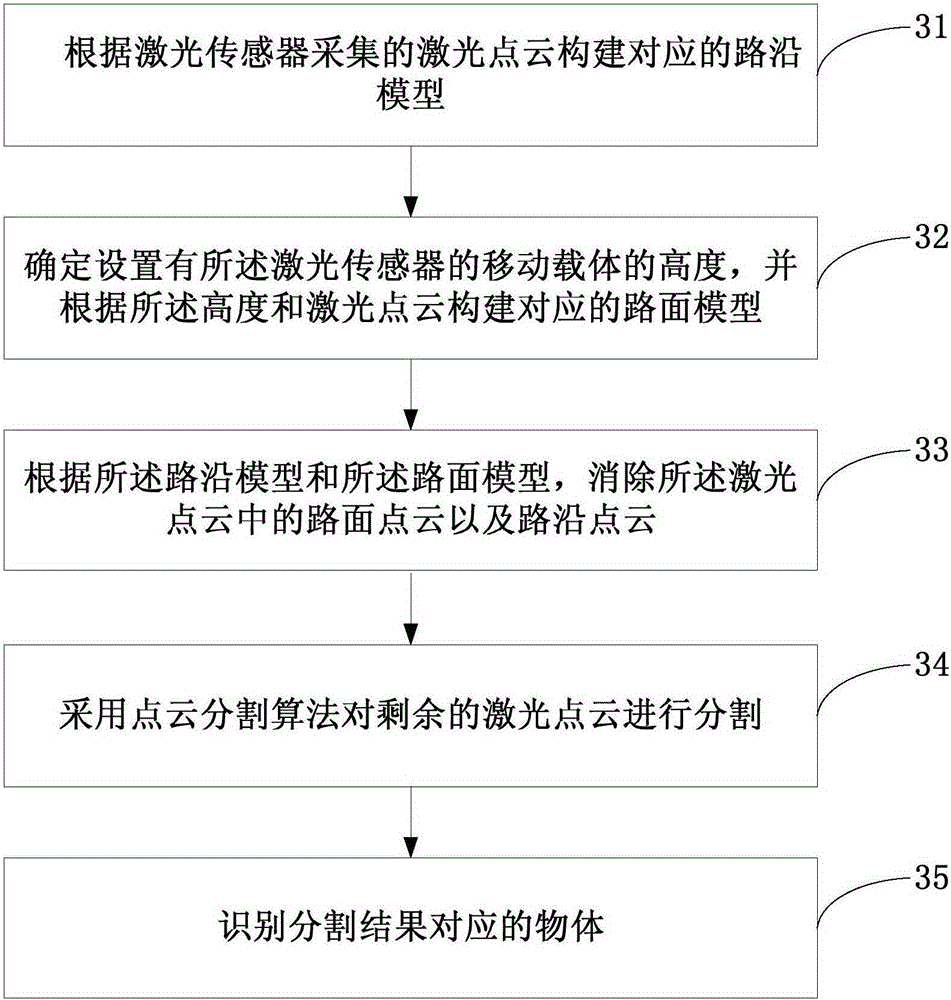
[0047] Based on the above-mentioned embodiments, this embodiment provides another method for identifying urban roads based on laser point clouds, which further limits the point cloud segmentation method. image 3 It is a schematic flowchart of a laser point cloud-based urban road recognition method provided by Embodiment 3 of the present invention. see image 3 The method for identifying urban roads based on laser point clouds provided in this embodiment specifically includes the following:
[0048] S31. Construct a corresponding roadside model according to the laser point cloud collected by the laser sensor.
[0049] S32. Determine the height of the mobile carrier provided with the laser sensor, and construct a corresponding road surface model according to the height and the laser point cloud.
[0050] S33. According to the roadside model and the road surface model, eliminate the road surface point cloud and the roadside point cloud in the laser point cloud.
[0051] Exemp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com