Biped robot based on pneumatic artificial muscles
A pneumatic artificial muscle and biped robot technology, applied in the field of humanoid robots, can solve the problems of poor compliance, complex system structure, low energy efficiency of the robot, etc., and achieve the effects of good flexibility, simple system structure and convenient use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
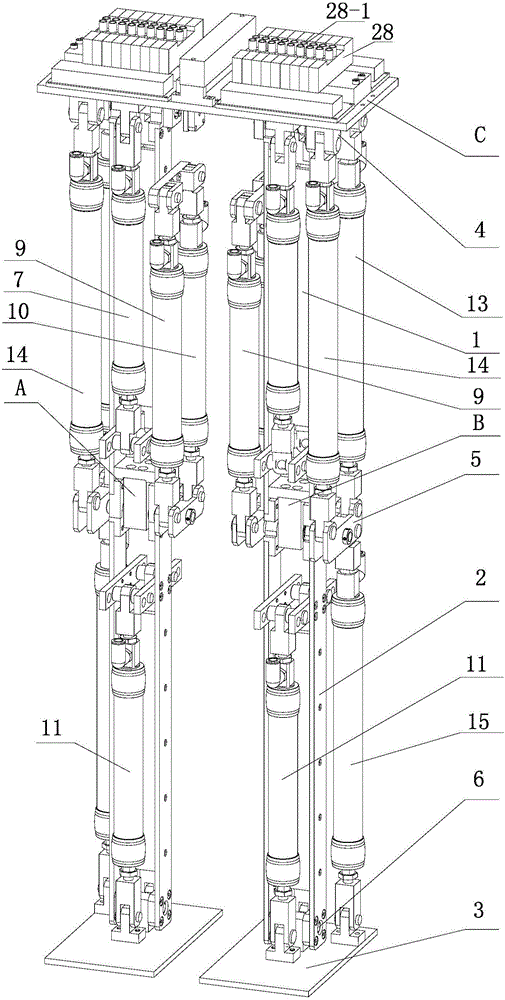
[0010] Specific implementation mode one: combine Figure 1-Figure 6 Illustrate, a kind of biped robot based on pneumatic artificial muscle of this embodiment, it comprises left leg A, right leg B and pelvis C; Left leg A and right leg B respectively comprise thigh 1, calf 2, foot 3, hip Joint 4, knee joint 5 and ankle joint 6; left leg A and right leg B are connected through pelvis C, pelvis 3 is rotationally connected with thigh 1 through hip joint 4, thigh 1 is rotationally connected with calf 2 through knee joint 5, and calf 2 is rotationally connected through knee joint 5 The ankle joint 6 is rotationally connected with the foot 3;
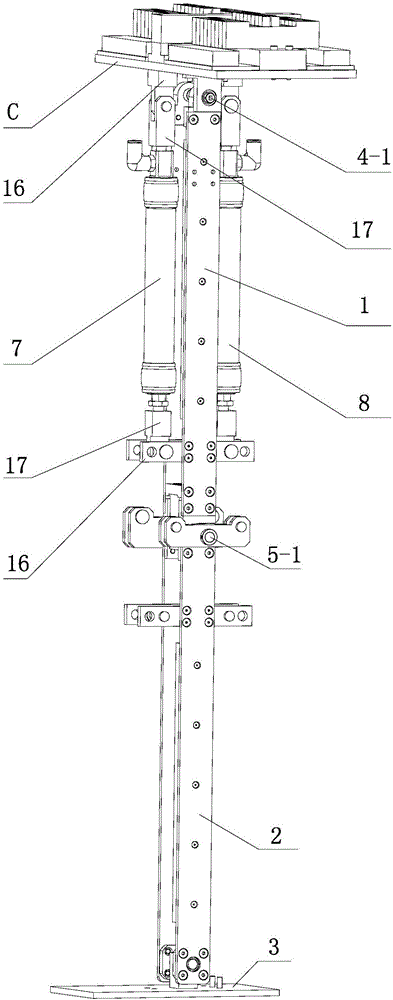
[0011] The left leg A and the right leg B also include nine pneumatic tendons respectively. The nine pneumatic muscles are iliacus 7, gluteus major 8, vastus lateralis 9, biceps femoris 10, tibialis anterior 11, soleus 12, semitendinosus Muscle 13, rectus femoris 14 and gastrocnemius 15;
[0012] Thigh 1 is provided with iliacus 7 , vastus m...
specific Embodiment approach 2
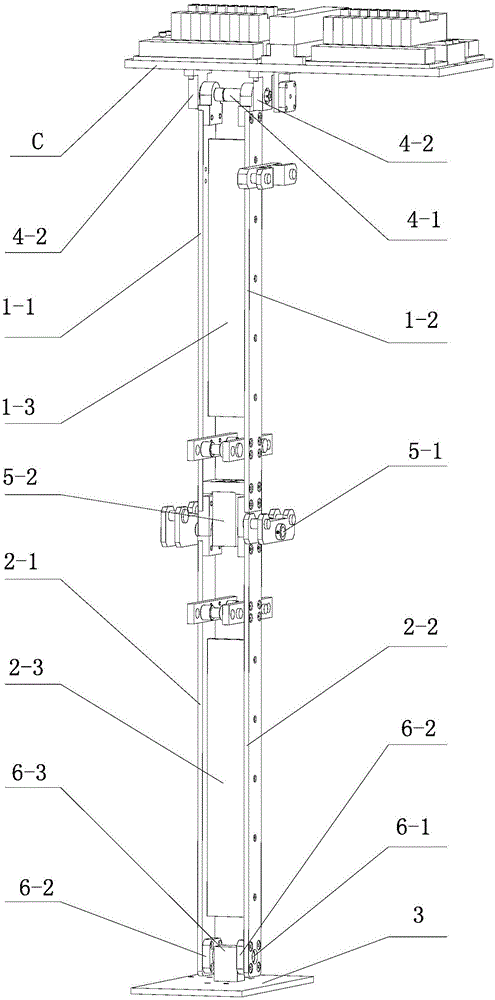
[0015] Specific implementation mode two: combination figure 2 Illustrate, each thigh 1 of present embodiment comprises outer thigh board 1-1, inner thigh board 1-2 and thigh support board 1-3; The thigh support plate 1-3 connected by the two, the hip joint 4 includes two first bearing assemblies 4-2, the two first bearing assemblies 4-1 are installed on the pelvis C respectively, and the hip joint shaft 4-1 is rotated and installed on On the two first bearing assemblies 4-2, the inner thigh plate 1-2 and the outer thigh plate 1-1 are fixedly connected to the hip joint shaft 4-1 respectively. With such arrangement, the outer thigh board and the inner thigh board are connected to the hip joint shaft through the flat key, so that when the hip joint shaft rotates, the thigh is driven to rotate. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0016] Specific implementation mode three: combination figure 2 Illustrate, each calf 2 of present embodiment comprises calf outer plate 2-1, calf inner plate 2-2 and thigh supporting plate 2-3; The calf support plate 2-3 connected by the two, the knee joint 5 includes a second bearing assembly 5-2, the ankle joint 6 includes two third bearing assemblies 6-2, and the second bearing assembly 5-2 is fixed on the outer thigh plate 1-1 and thigh inner board 1-2, the knee joint shaft 5-1 is installed on the second bearing assembly 5-2, and the upper part of the calf outer board 2-1 and the upper part of the lower leg inner board 2-2 are respectively fixed on the On the knee joint shaft 5-1, a third bearing assembly 6-2 is installed on the lower part of the calf outer plate 2-1 and the lower leg inner plate 2-2, and the ankle joint shaft 6-1 is installed on two third bearing assemblies 6 -2, the foot 3 is connected to the ankle joint axis 6-1. In this way, the outer plate of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com