Hexapod robot autonomous navigation closed-loop controller with fuzzy neural network
A technology of fuzzy neural network and hexapod robot, which is applied in the direction of two-dimensional position/channel control, etc., can solve problems such as too close, lack of fuzzy information processing and description capabilities, and inability to accurately obtain obstacle boundary information, so as to avoid errors Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
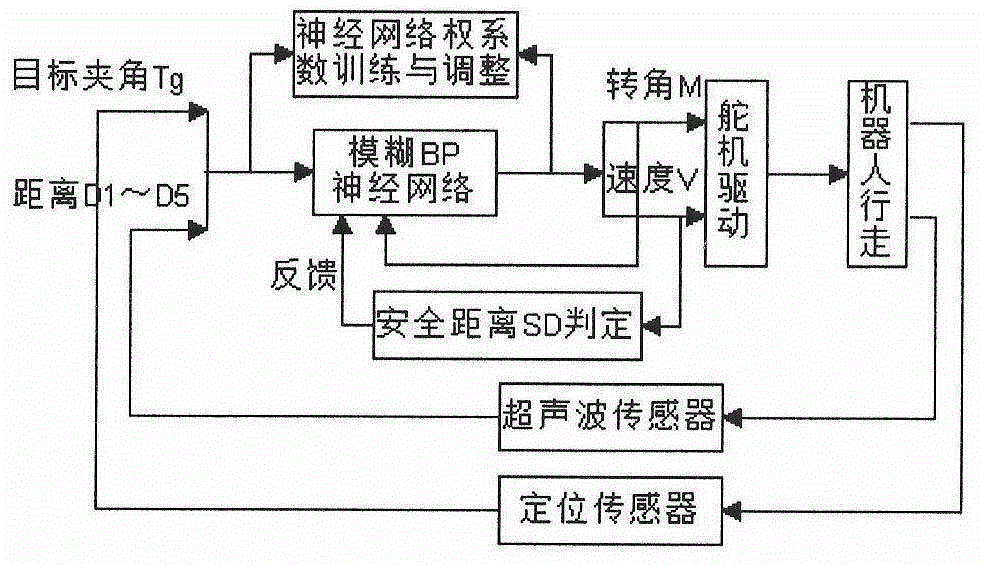
[0020] like figure 1 The hexapod robot autonomous navigation closed-loop controller of the shown fuzzy neural network includes a hexapod robot, and the hexapod robot is composed of a shell and a steering gear; it also includes a navigation control system; and a safety distance SD built into the navigation control system Determination module, fuzzy BP neural network module and neural network weight coefficient training and adjustment module; and a detection steering gear and orientation sensor arranged at the center of the hexapod robot; and an ultrasonic sensor arranged on the detection steering gear; the orientation sensor It consists of an electronic compass and GPS; the azimuth sensor and the ultrasonic sensor are electrically connected to the navigation control system; the navigation control system is electrically connected to the control end of the steering gear; the present invention uses BP neural network as the basic framework, and adds fuzzy logic layer and feedback T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com