
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A Neural Network Backstepping Sliding Mode Attitude Control Method for Flexible Satellites
A technology of flexible satellites and backstepping sliding mode, which is applied in attitude control and other directions, can solve the problems of antenna rotation disturbance steady-state accuracy and stability, and needs to be improved, so as to improve steady-state accuracy and stability, weaken chattering, The effect of suppressing disturbance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
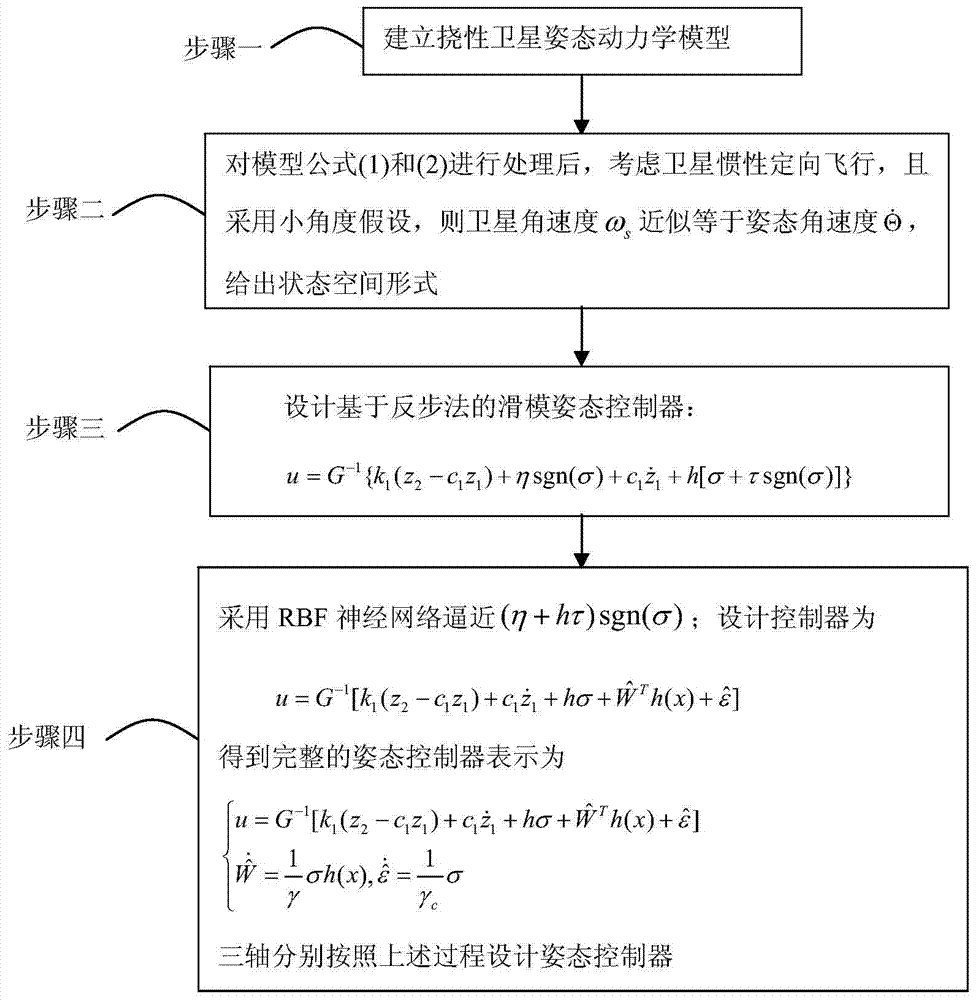
[0047] Specific implementation manner 1: A flexible satellite neural network backstep sliding mode attitude control method, including the following steps:
[0048] Step 1: Establish a flexible satellite attitude dynamics model:
[0049] The hybrid coordinate method is used to establish a flexible satellite attitude dynamics model. The dynamic equation containing two windsurfing boards and a moving antenna has the following form:
[0050]
[0051] The attached modal equation is:
[0052]
[0053] Among them, ω s =[ω x ,ω y ,ω z ] T ∈R 3 Is the satellite angular velocity, which is essentially the attitude angular velocity vector of the system relative to the inertial system and projected into the system; I s ∈R 3×3 Is the stellar moment of inertia matrix; u∈R 3 It is the three-channel control torque vector of the star provided by the actuator (flywheel, momentum wheel, thruster, etc.); d∈R 3 It is the interference torque experienced by the satellite, including environmental interference ...
specific Embodiment approach 2
[0070] Specific implementation manner 2: The specific implementation process of step 2 described in this implementation manner is as follows:
[0071] Use Euler angles to describe the satellite attitude, and consider the X-Y-Z rotation sequence. The corresponding rotation attitude angles are the satellite attitude roll angles. Satellite attitude pitch angle θ and satellite attitude yaw angle ψ, when the satellite is in inertial directional flight, ω s Expressed as
[0072]
[0073] From the above formula, the satellite attitude kinematics equation is
[0074]
[0075] Figure 5 Is a schematic diagram of the satellite structure with a moving antenna; Figure 5 As shown, the coordinate system OX b Y b Z b Is the satellite body coordinate system, OX a1 Y a1 Z a1 Is the antenna support arm coordinate system, OX a Y a Z a Is the antenna body coordinate system; assuming that the antenna is installed in the negative direction of the yaw axis of the satellite body, the antenna surface faces ...
specific Embodiment approach 3
[0098] Specific implementation manner 3: The specific implementation process of step 3 described in this implementation manner is as follows:
[0099] Step 3.1, set the tracking error z 1 = X d -x 1 ; X d Input for reference, x d When it is 0, there is z 1 =-x 1 ;
[0100] Virtual control then Where c 1 Is the parameter to be designed, c 1 >0;
[0101] Take the Lyapunov function as
[0102]
[0103] Derive it with respect to time
[0104]
[0105] Take the sliding surface
[0106]
[0107] Where k 1 >0;
[0108] When σ=0, z 1 =0, z 2 = 0 and Therefore, the next step of design is needed;
[0109] Step 3.2, then take the Lyapunov function as
[0110]
[0111] Derive it with respect to time
[0112]
[0113] The design controller is
[0114]
[0115] In the formula, h and τ are positive numbers, η≥|D|;
[0116] Bring the controller in Have
[0117]
[0118] take
[0119]
[0120] considering
[0121]
[0122] In the formula, z=[z 1 ,z 2 ] T ; If Q is a positive definite matrix, then
[0123]
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com