Unmanned underwater vehicle (UUV) track tracking control optimization method under environmental interference
A technology for unmanned aerial vehicles and track tracking, which is applied in three-dimensional position/channel control and other directions, and can solve the problem of low accuracy of UUV track tracking control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
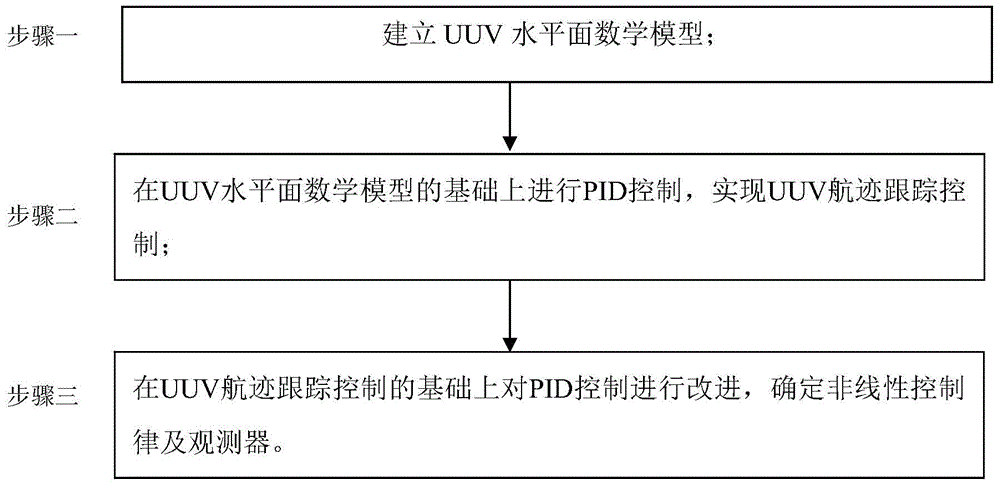
[0016] Specific implementation mode one: combine figure 1 Illustrate this embodiment, the underwater unmanned aerial vehicle track tracking control optimization method under environmental interference is specifically carried out according to the following steps:
[0017] Step 1. Establish a UUV horizontal plane mathematical model;
[0018] Step 2. On the basis of the UUV horizontal plane mathematical model, perform PID control on the unmanned aerial vehicle to realize UUV track tracking control;
[0019] Step 3: Improve the PID control on the basis of the UUV track tracking control, and determine the nonlinear control law and observer.
specific Embodiment approach 2
[0020] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the UUV horizontal plane mathematical model is established in the step 1; the specific process is:
[0021] (1) Establishment of kinematic equations:
[0022] Let the UUV center of gravity pose matrix in the earth coordinate system be η=[x,y,ψ] T , the angular velocity matrix in the earth coordinate system is The angular velocity matrix in the carrier coordinate system is V=[u,v,r] T ;
[0023] According to the conversion relationship between the earth coordinate system and the carrier coordinate system, the kinematic equation is obtained:
[0024] x . = u cos ψ - v sin ψ y . ...
specific Embodiment approach 3
[0066] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that: in the said step two, on the basis of the UUV horizontal plane mathematical model, the unmanned aerial vehicle is controlled by PID to realize the UUV track tracking control; The specific process is:
[0067] PID control algorithm:
[0068] ψ e = ψ d -ψ
[0069] where, ψ d is the real-time expected heading, which is the expected value artificially set by programming, ψ is the actual heading value when the UUV is sailing, and ψe is the heading error;
[0070] The PID control law of UUV heading is: ψ = k p · ψ e + k i · ∫ ψ e + k d · ψ . e ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com