Separable multi-arm soft mechanical arm device
A technology of soft machinery and robotic arms, which is applied in medical science, surgery, diagnosis, etc., can solve the problems of contact damage to body tissues, affecting the normal operation of the mechanism, complex structure and drive, etc., to achieve small trauma, excellent chemical stability, Control simple and reliable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0038] This embodiment provides a detachable multi-arm soft robotic arm device, including:
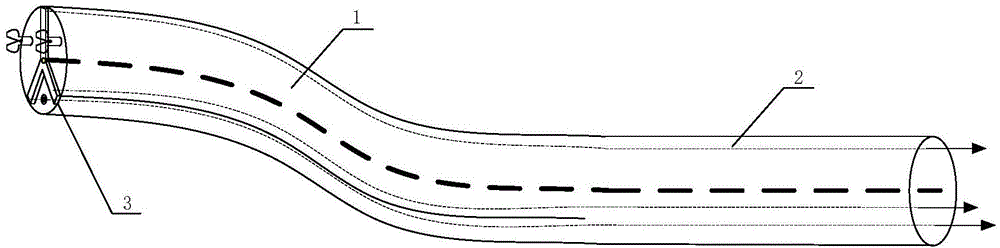
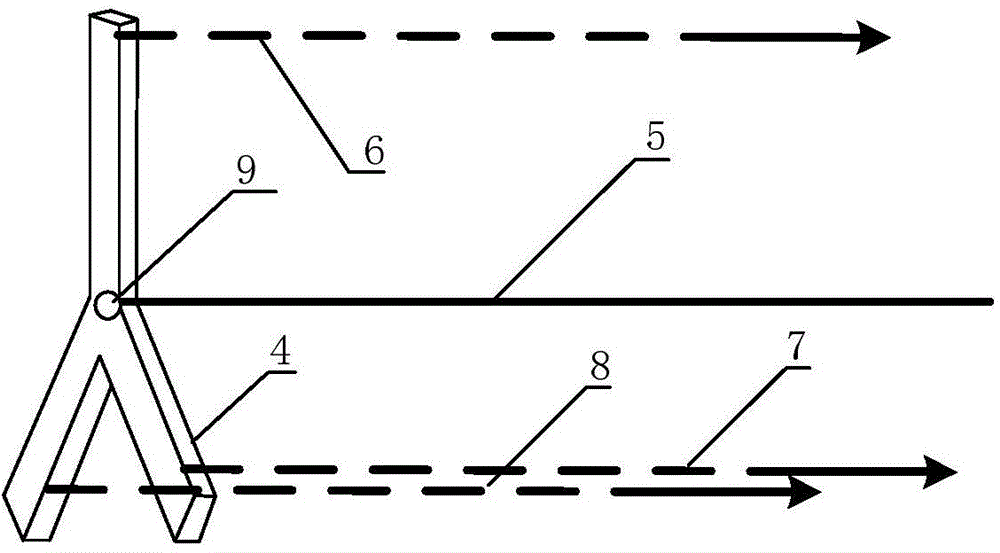
[0039] A functional sub-arm part, the functional sub-arm part includes a functional sub-arm part and a visual sub-arm part. The functional sub-arm and visual sub-arm can be controlled respectively by sub-arm traction lines. Theoretically, the arm has unlimited degrees of freedom, and can complete bending movements at any angle, as well as telescopic movements within a certain range.
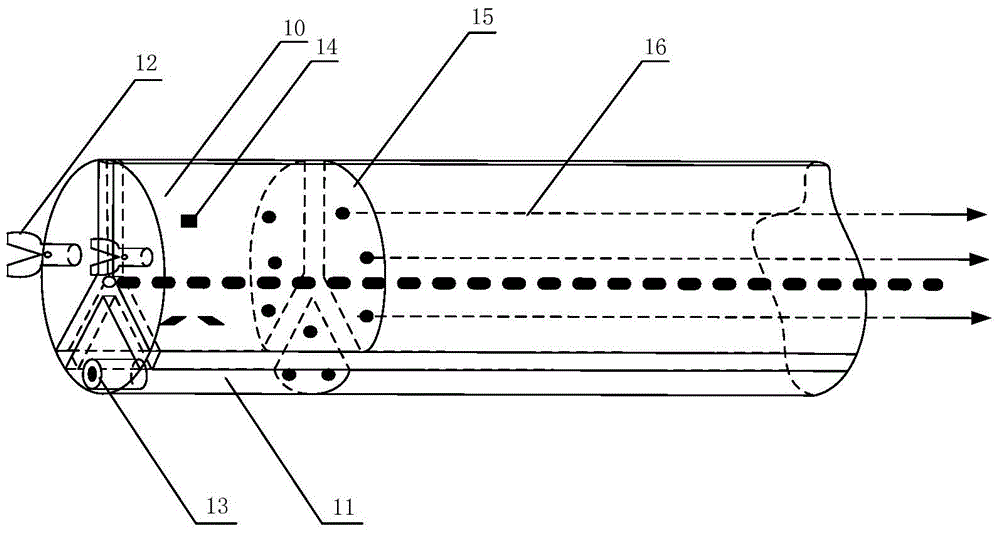
[0040] The total arm part is fixed, and the fixed total arm part is located at the rear of the sub-arm to provide certain strength support for the whole device. And the detachable multi-arm soft manipulator is connected with the fixed base.
[0041] The supporting part is located at the axial center of the whole device, runs through the whole device longitudinally, and provides support for the device. Before the device enters the human body through a single incision and does not reach the target organ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com