


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
An energy storage type frog-like jumping robot
A robot, energy storage technology, applied in the field of jumping robots, can solve the problems of not being able to play their respective advantages, the spring power density is high, the buffering effect is not good, etc., to optimize the leg structure, strong jumping explosive force, improve flexibility and buffering. effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The present invention is described in more detail below in conjunction with accompanying drawing example:
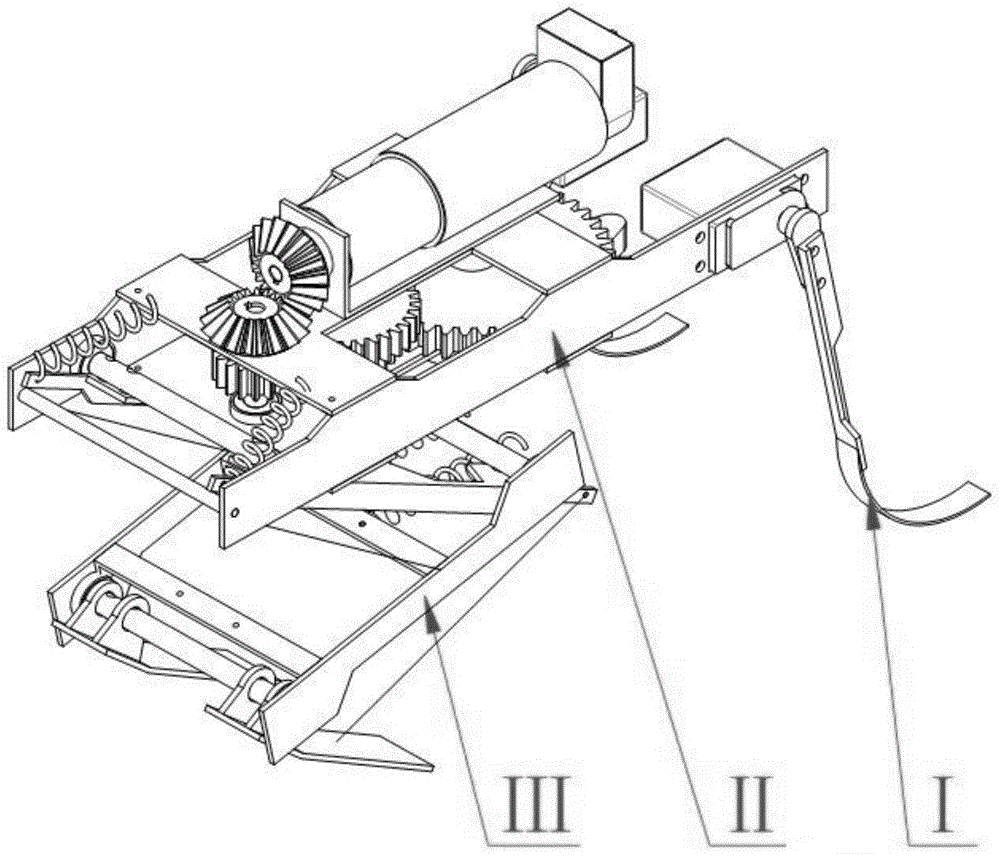
[0025] combine Figure 1~5 , the entire energy-storage frog-like robot is mainly composed of three parts: forelimb Ⅰ, torso Ⅱ, and hindlimb Ⅲ; the entire robot specifically includes:
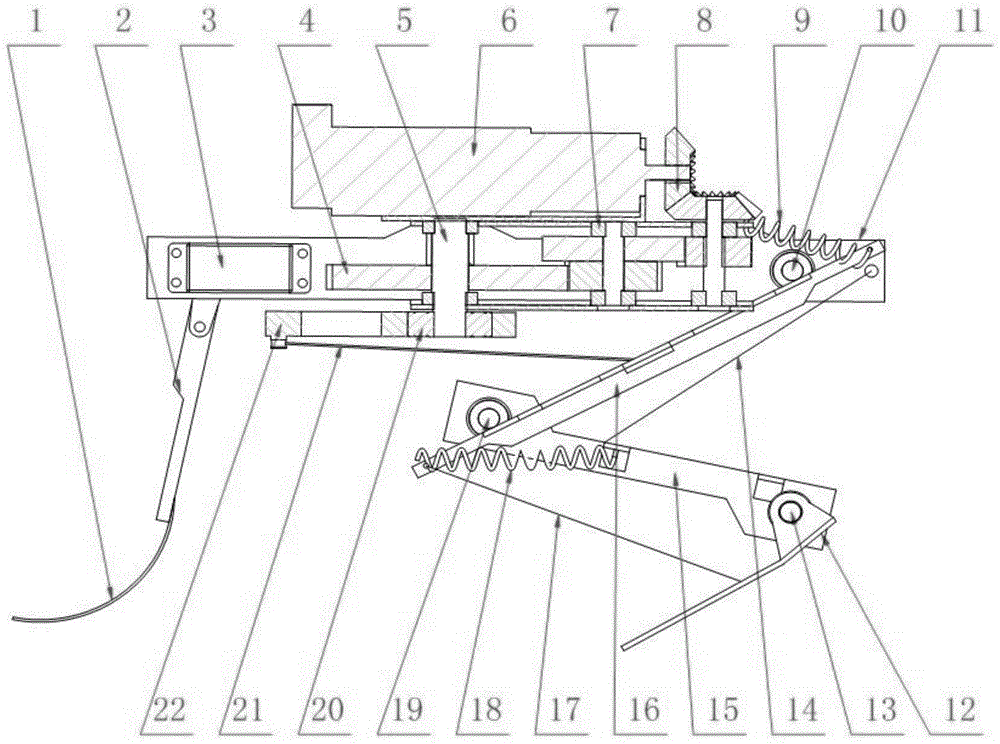
[0026] C-shaped flexible forefoot 1, forelimb thigh 2, steering gear 3, secondary gear reducer 4, crank shaft 5, servo motor 6, deep groove ball bearing 7, bevel gear 8, hip joint energy storage spring 9, hip joint shaft 10. Trunk structure aluminum plate 11, hind limb sole 12, ankle joint axis 13, calf linkage cable 14, hind limb calf 15, hind limb thigh 16, sole linkage cable 17, knee joint energy storage spring 18, knee joint axis 19, one-way Bearing 20, hindlimb driving cable 21, rotary crank 22.
[0027] The assembly relationship of the entire energy-storage frog-like robot is as follows: the entire torso II is a frame composed of aluminum plates connected by screws; the serv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com