Automatic vehicle-mounted three-dimensional laser point cloud facade classification and outline extraction method
A three-dimensional laser, contour line technology, applied in image analysis, the use of optical devices, image data processing, etc., to reduce the collection workload, save production costs, and fully automate the processing process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
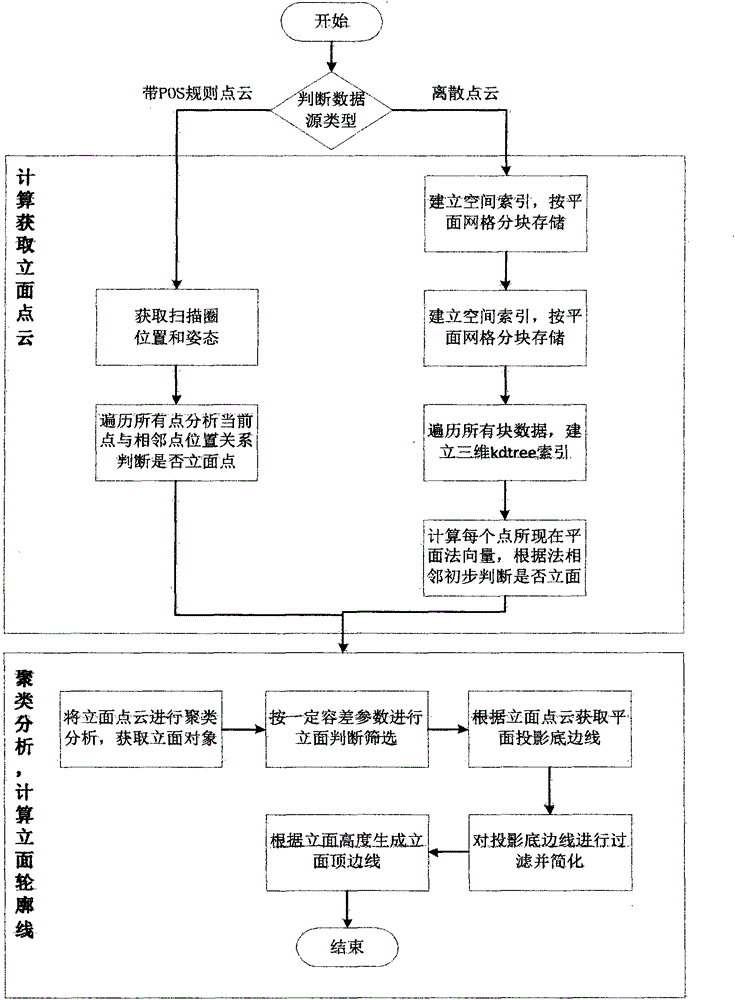
[0032] The implementation of including POS trajectory data involves two input data sources, namely POS trajectory and point cloud data.
[0033] I Among them, the POS trajectory is the time, position and posture of each scanning circle scanning time during the vehicle driving process, including: year, month, day, hour, minute, second, millisecond, longitude, latitude, Gaussian projection coordinates XYZ.
[0034] The point cloud data is stored in circles according to the scanning order, and the file header contains basic data and circle index data. The method steps used are as follows:
[0035] (1) Traverse all circles of the point cloud and obtain the POS coordinate P of the current circle 0 (X p0 , Y p0 ,Z p0 ). Traverse all the points in the current circle and calculate the current point P(X p , Y p ,Z p ) To P 0 The distance D. According to the distance D and the angular resolution θ, calculate the spherical theoretical distance D s . Get a total of 4 points before and after t...
Embodiment 2
[0047] For discrete point cloud data, first divide the point cloud data into a plane grid, store it in blocks and establish a block index, then traverse the point cloud data in blocks, calculate the normal vector of each point, and judge whether it is a facade according to the normal vector point.
[0048] The specific implementation steps are as follows:
[0049] (1) Calculate the spatial range of the disordered discrete point cloud, divide the grid according to the spatial range and the amount of point cloud data to ensure that the number of points of the divided point cloud does not exceed 10,000, and establish the LOD spatial index.
[0050] (2) Traverse all the point cloud blocks and establish a three-dimensional kdtree index for the point cloud blocks. Traverse each point in the block, find the nearest N points according to the kdtree index (default 128), and calculate the normal vector by fitting the plane to the nearby N points. If the angle between the normal vector and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com