Floating body positioning system
A positioning system and floating body technology, applied in the field of positioning systems, can solve problems such as low accuracy, inaccurate positioning, and anchor chain wear, and achieve the effects of avoiding mopping problems, long service life, and increased accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
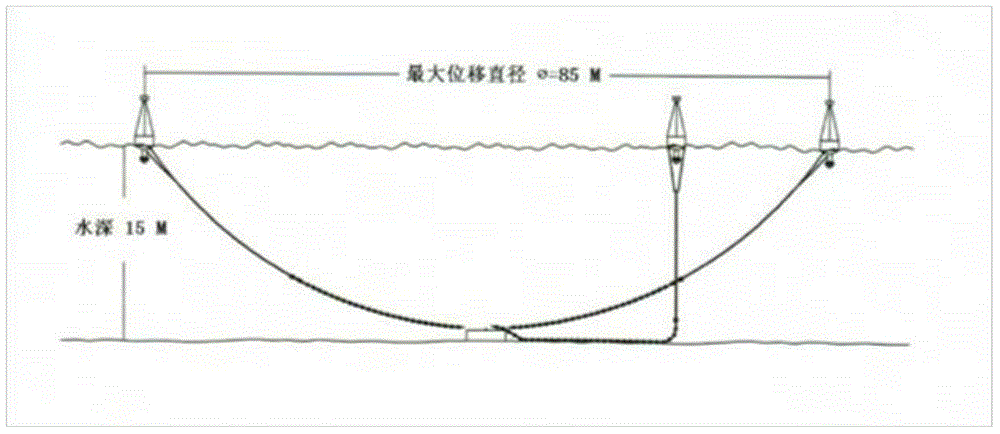
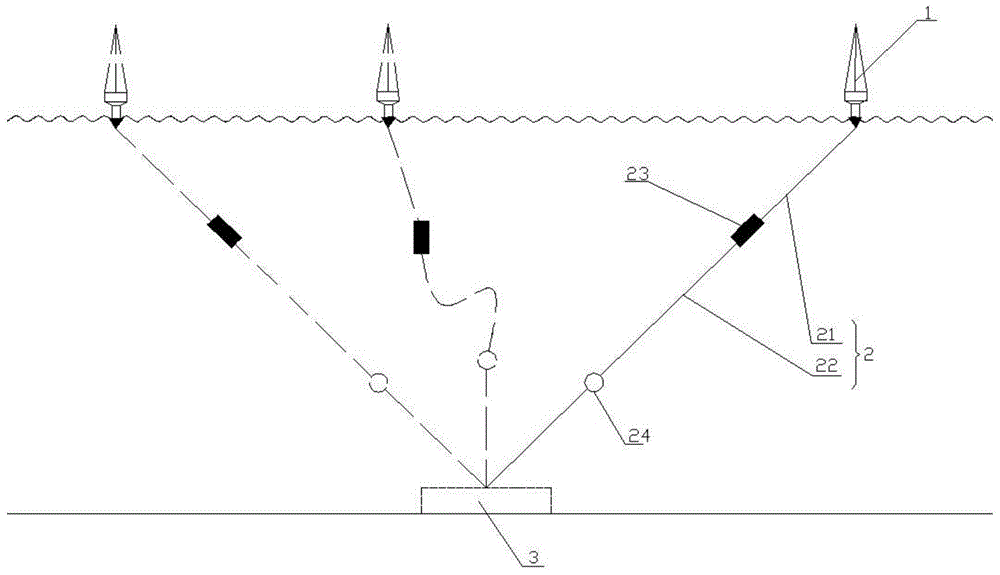
[0021] like figure 1 As shown, it is a traditional floating body, the water depth is 15m, the positioning rope is a metal anchor chain, the length needs to be 45m, and the maximum displacement diameter of the floating body is 85m. like figure 2 As shown, the application of a floating body positioning system of the present invention on a floating body includes a floating body 1, a positioning rope 2 and an anchor point 3. One end of the floating body 1 is connected to the positioning rope 2, and the other end of the positioning rope 2 is fixed on the anchor point. On point 3, the positioning rope 2 is a fiber cable, which is strong and durable, and is resistant to corrosion by seawater. The positioning rope 2 includes a suspension rope 21 and a traction rope 22. One end of the suspension rope 21 is connected to the floating body 1, and the other end of the suspension rope 21 is connected to the traction rope 22. At the same time, the connection between the suspension rope 21 ...
Embodiment 2
[0025] like Figure 4 As shown, it is another embodiment of the present invention. The difference from Embodiment 1 is that this embodiment adopts two anchor points 3 and two traction ropes 22. The traction ropes 22 are respectively connected to the anchor points 3, and the suspension ropes One end is connected to the floating body 1, the other end is connected to two traction ropes 22, a counterweight system 23 is provided at the connection, a floating ball 24 is provided at the lower end of the two traction ropes 22, and the distance between the two anchor points 3 is E, The water depth P, L is the length of the traction rope 22, wherein, L is equal to 1 times the parameter E, E=P, P is 20m, and the length of the suspension rope is 1 / 2P=10m. Figure 5 The movement range of the floating body 1 is shown in Fig. 1. The movement range of the floating body is in a fusiform shape, and the movement diameter is 25m.
Embodiment 3
[0027] like Image 6 As shown, it is another embodiment of the present invention. The difference from Embodiment 2 is that this embodiment adopts three anchor points 3 and three traction ropes 22. The traction ropes 22 are respectively connected to the anchor points 3, and the suspension ropes One end is connected to the floating body 1, the other end is connected to three traction ropes 22, a counterweight system 23 is provided at the connection, and a floating ball 24 is provided at the lower end of the three traction ropes 22, wherein the distance between the two anchor points 3 is ΦD , the water depth P, L is the length of the traction rope 22, where L is equal to 0.8 times the parameter ΦD, ΦD=P, P is 20m, the length of the suspension rope is 1 / 2P=10m, and the length of the traction rope 22 L is 16m. Figure 7 The moving range of the floating body 1 is shown in Fig. 1. The moving range of the floating body is smaller than that in Example 2. The rotation radius of the floa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com