Intra-abdominal magnetic anchoring electrotome robot with replaceable electrotome
A robot and electrosurgical technology, applied in the field of instruments in laparoscopic minimally invasive surgery, can solve problems affecting the quality of surgery, high labor intensity, and easy fatigue, and achieve the effects of increasing the scope of application, reducing labor intensity, and improving quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
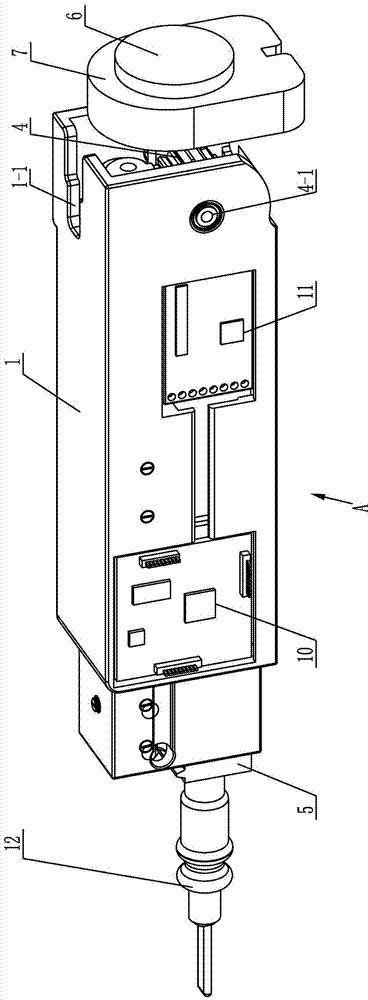
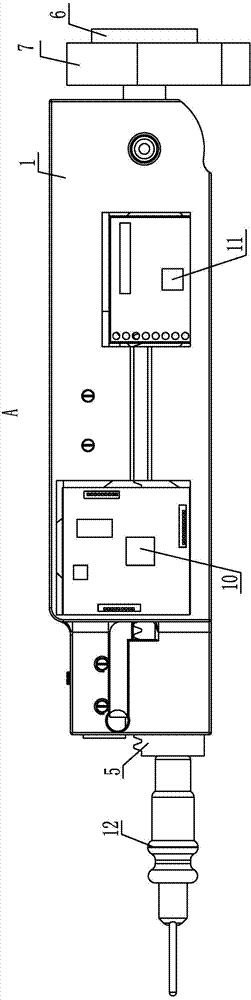
[0015] Specific implementation mode 1: Combination Figure 1-Figure 4 It is explained that the intra-abdominal magnetically anchored electrosurgical electrosurgical robot of this embodiment includes a mechanical structure unit and an electronic control unit;
[0016] The mechanical structure unit includes a housing 1, a first worm 2, a second worm 3, a worm wheel 4, a rack 5, a permanent magnet 6 and a suspension base 7;
[0017] The electronic control unit includes a first motor 8, a second motor 9, a control circuit module 10 and a wireless transceiver module 11;
[0018] The housing 1 is a closed cavity. The inner side wall of the housing 1 is embedded with a control circuit module 10 and a wireless transceiver module 11. The housing 1 is arranged with a first worm 2, a second worm 3, a worm wheel 4, and a rack 5. The first motor 8 and the second motor 9;
[0019] The control circuit module 10 is connected to the wireless transceiver module 11 through a data line, and the control c...
specific Embodiment approach 2
[0024] Specific implementation manner two: combination Figure 2-Figure 4 Note that the rack 5 of this embodiment is a titanium alloy rack. This arrangement reduces the weight of the rack and at the same time increases the strength of the rack. Others are the same as the first embodiment.
specific Embodiment approach 3
[0025] Specific implementation mode three: combination Figure 2-Figure 4 It is explained that the modulus of the rack 5 of this embodiment is 0.5. This setting is convenient and reliable. Others are the same as the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com