


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Indoor positioning device and method based on inertial guidance and radio frequency identification
A radio frequency identification and inertial guidance technology, which is used in measurement devices, navigation, mapping and navigation, etc., and can solve the problems of easy interference by lights, high energy consumption of locators, and low positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
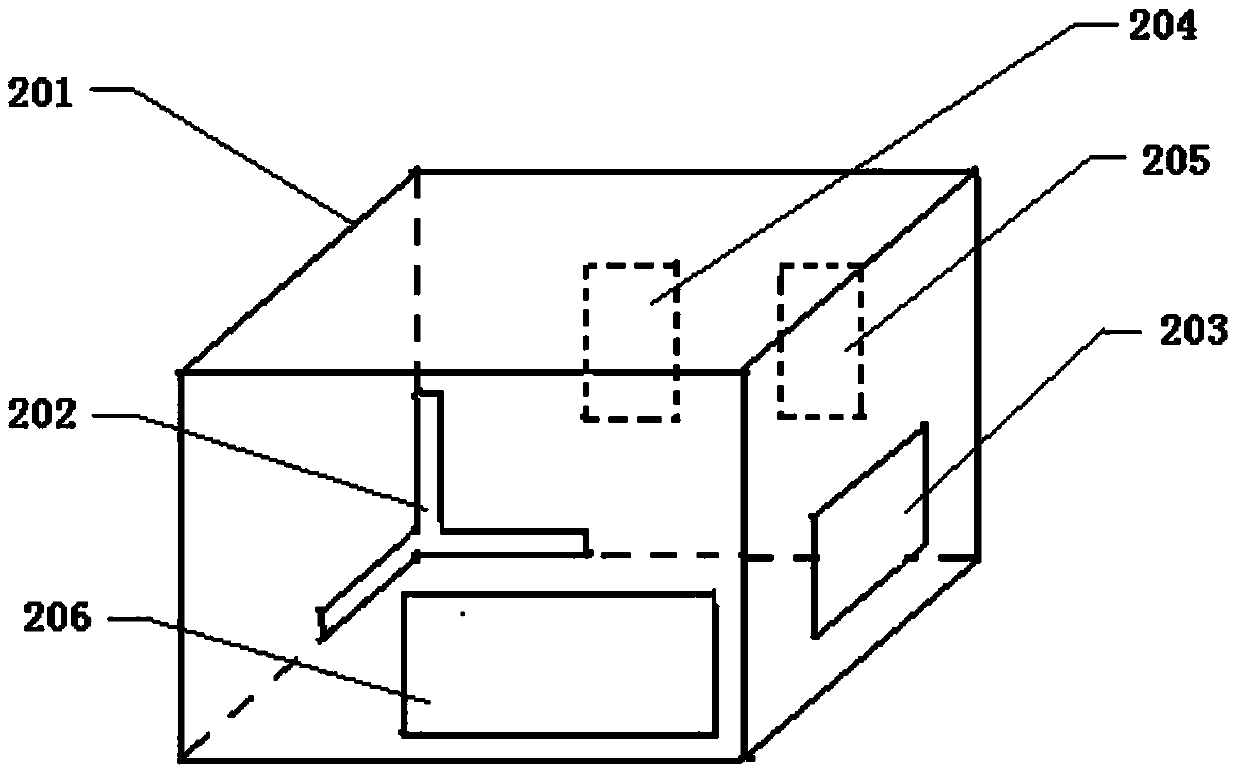
[0042] This embodiment provides an indoor positioning device based on inertial guidance and radio frequency identification, the structure is as follows figure 1 , figure 2 As shown, it includes a positioning terminal, a radio frequency transmitting module and a server. The radio frequency transmitting module has a unique serial number and three-dimensional position information. The positioning terminal is equipped with a radio frequency receiver. Every time a positioning terminal passes through a radio frequency transmitting module, the radio frequency receiver is enough. To obtain accurate position information, the positioning terminal includes a three-dimensional accelerometer 202, a three-axis gyroscope 203, a radio frequency signal receiver 204, a wireless communication module 205, a microprocessor 206 and a housing 201, and the three-dimensional accelerometer 202 and the three-axis gyroscope 203 are fixed In the shell 201, the Z axis of the shell 201 is vertically upward...
Embodiment 2
[0045] This embodiment provides an indoor positioning method based on inertial guidance and radio frequency identification, and its system workflow includes the following steps:
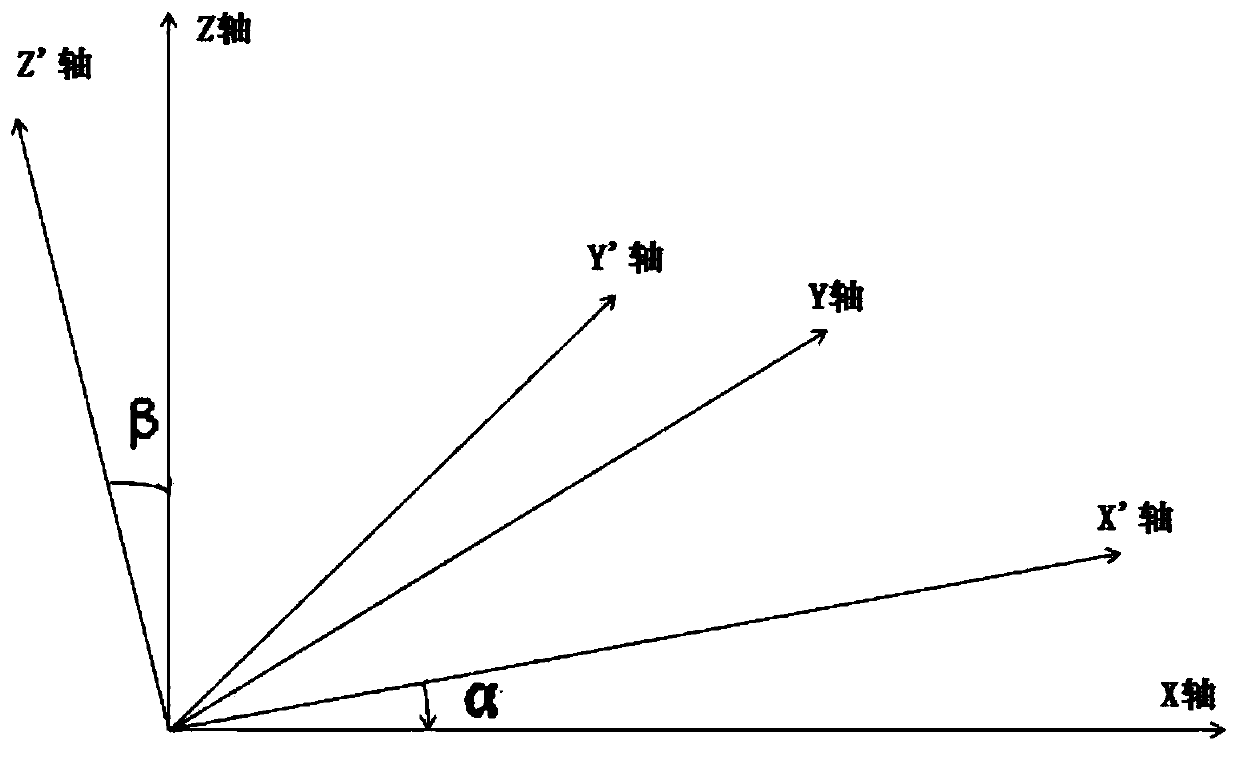
[0046] Step 1: Download the 3D map information of the indoor place to be positioned to the positioning terminal, determine an origin in the room to be positioned, take the vertical ground upward as the Z axis, set the X and Y axes in any mutually perpendicular direction, and establish a three-dimensional right angle Coordinate system, set the unit length to decimeter;
[0047] Step 2: Determine the coordinates of the initial position of the positioning terminal, set the coordinates of the initial point of the positioning terminal as (x0, y0, z0), and set the velocity to zero and the acceleration to zero;
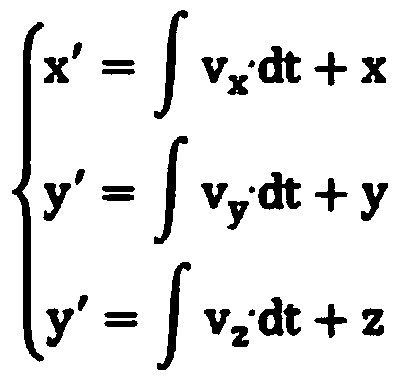
[0048] Step 3: The user holds the positioning terminal to move in the indoor place, the positioning terminal records the three-dimensional acceleration and deflection angle in real time, and the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com