Homography matrix H computing method of single line array camera
A homography matrix and calculation method technology, applied in calculation, image data processing, instruments, etc., can solve problems such as increased system complexity, difficulty in setting speed, and inability to obtain values, and achieve a simple system with few restrictions Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to better understand the technical solutions of the present invention, the implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings.
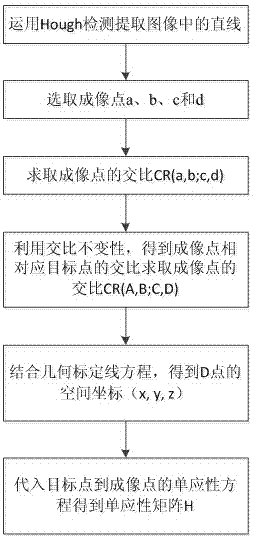
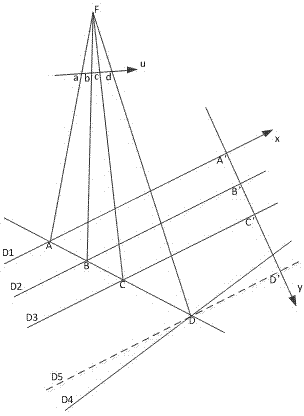
[0036] like figure 1 As shown, the present invention first performs Hough operation on the obtained image to obtain the straight line in the image, and selects the target point to calculate the cross ratio. According to the characteristics of the single line array camera imaging system, the cross-ratio of the target point is obtained by combining the invariance of the cross-ratio. Use the equation of the calibration line in the calibration plate to obtain the coordinates of point D.
[0037] The concrete implementation of the present invention is as follows:
[0038] 1. Use the Hough algorithm to extract the lines in the image captured by the single-line array camera, take a line in the image plane, and intersect this line with the captured 4-line calibrati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com