Method and device for automatic docking of underwater vehicle and base station under guidance of light
An underwater vehicle and automatic docking technology, applied to underwater operation equipment, transportation and packaging, ships, etc., can solve problems such as complex algorithms and mechanical structures, achieve high-precision guidance results, simple structure of guidance devices, and high accuracy high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0025] The light source includes a lamp housing 11, and the lamp housing 11 is provided with a reflector 12, a high-brightness light source 13 and a filter 14 sequentially from the inside to the outside; 15°~30° conical divergent monochromatic light.
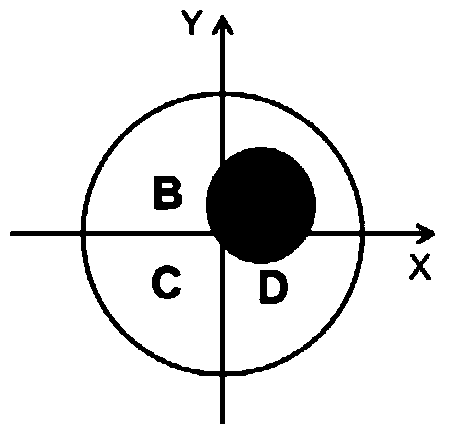
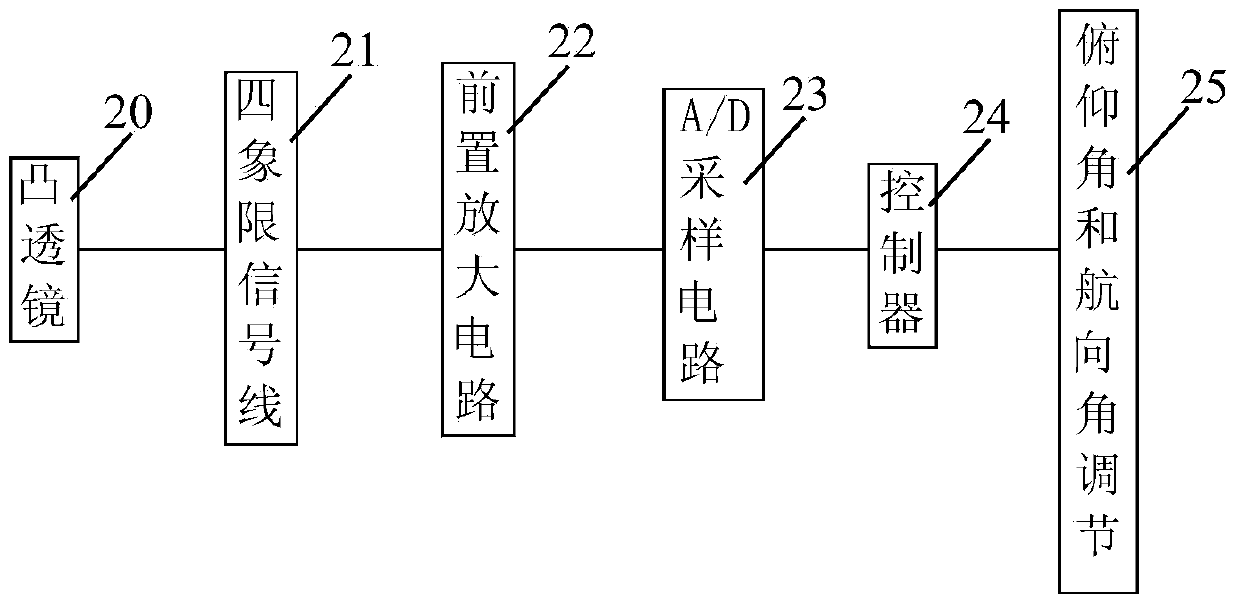
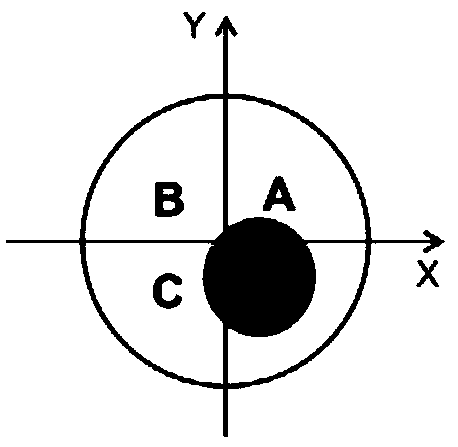
[0026] The four-quadrant photodetector comprises a convex lens 20 and a controller 24; the controller 24 is sequentially connected with an A / D sampling circuit 23, a preamplifier circuit 22 and a four-quadrant signal line 21; the convex lens 20 is arranged on one side of the four-quadrant signal line 21 On the other hand, the monochromatic light emitted by the light source is condensed by the convex lens 20, and the condensed light forms a spot, and through the irradiation area of the spot on the four-quadrant signal line 21, the four-quadrant signal line 21 can obtain the corresponding current. Just can judge the position of light spot at this moment according to the electric current that produces at this moment again; As, in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com