Ship electric servo fin and wing fin rolling stabilization intelligent vector control method
A vector control and electric servo technology, which is applied in the direction of using hydrofoils to reduce the movement of ships on the surrounding water surface, can solve the problems of the application limitation of anti-rolling algorithm, and the vector control method of electric drive fins/wing fins is not given, and achieves Compensate for inaccurate mathematical modeling, improve control effects, and stabilize output torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
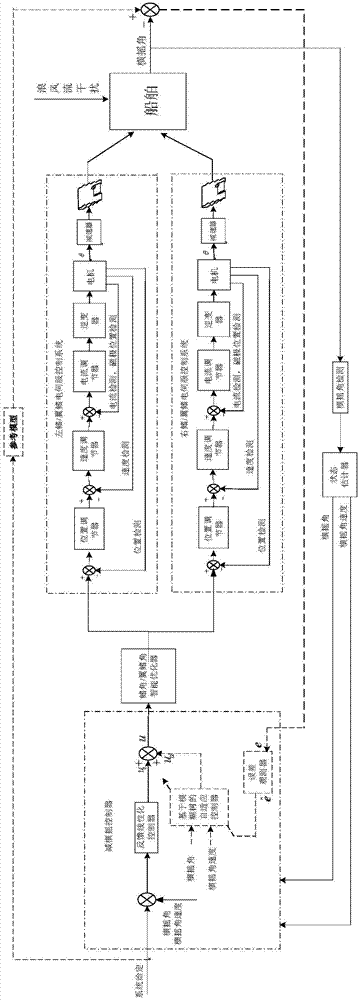
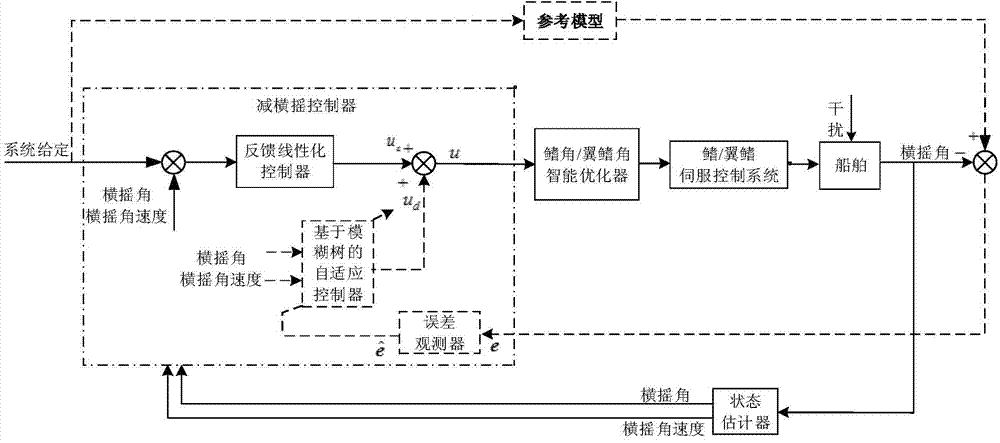
[0045] Such as figure 1 As shown, the system includes anti-roll controller, fin angle / wing fin angle intelligent optimizer, two sets of fin / wing fin electric servo systems, reference model, roll angle detection device and state estimator, etc., among which the anti-roll control The controller is composed of three parts: feedback linear controller, fuzzy tree-based adaptive controller and error observer.
[0046] Step 1: The roll detection device detects the roll angle, and estimates the roll angle and roll angular velocity of the system through the state estimator, and sends the difference with the given value to the feedback linearization controller;
[0047] Step 2: When the system is uncertain and qualitative, the feedback linearization controller has a large error, and the output of the feedback linearization controller is corrected by the adaptive controller based on the fuzzy tree to obtain the required roll righting moment; after correction The output signal of the ant...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com