A Path Planning Method for Mobile Robots in Dynamic Environment
A mobile robot, path planning technology, applied in two-dimensional position/channel control and other directions, can solve problems such as path planning obstacles for mobile robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
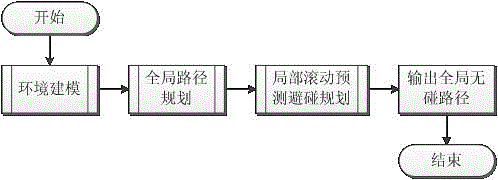
[0072] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0073] see figure 1 , a path planning method for a mobile robot in a dynamic environment. First, the grid method is used to model the environment of the robot's operating space, and then enter the first layer to plan the global path planning, and use the improved ant colony algorithm to plan a global path for the mobile robot, and then Entering the second layer of planning for local rolling prediction and collision avoidance planning, the robot performs local prediction and collision avoidance while walking along the planned global path. With the advancement of the rolling window, a global collision-free path can finally be obtained.
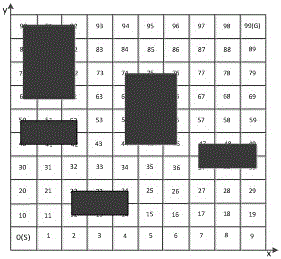
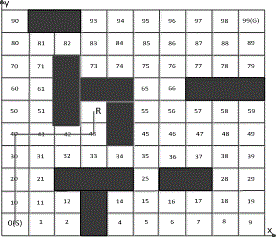
[0074] Among them, such as figure 2 As shown, the main idea of using the grid method for environment modeling is: set the lower left corner of the robot running space E as the origin of coordinates, horizonta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com