Consistency control method for network formation of multiple unmanned aerial vehicles
A control method and multi-UAV technology, applied in the field of flight control, can solve the problems of existence, reachability and stability verification of sliding mode control, and difficulty in finding Lyapunov functions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
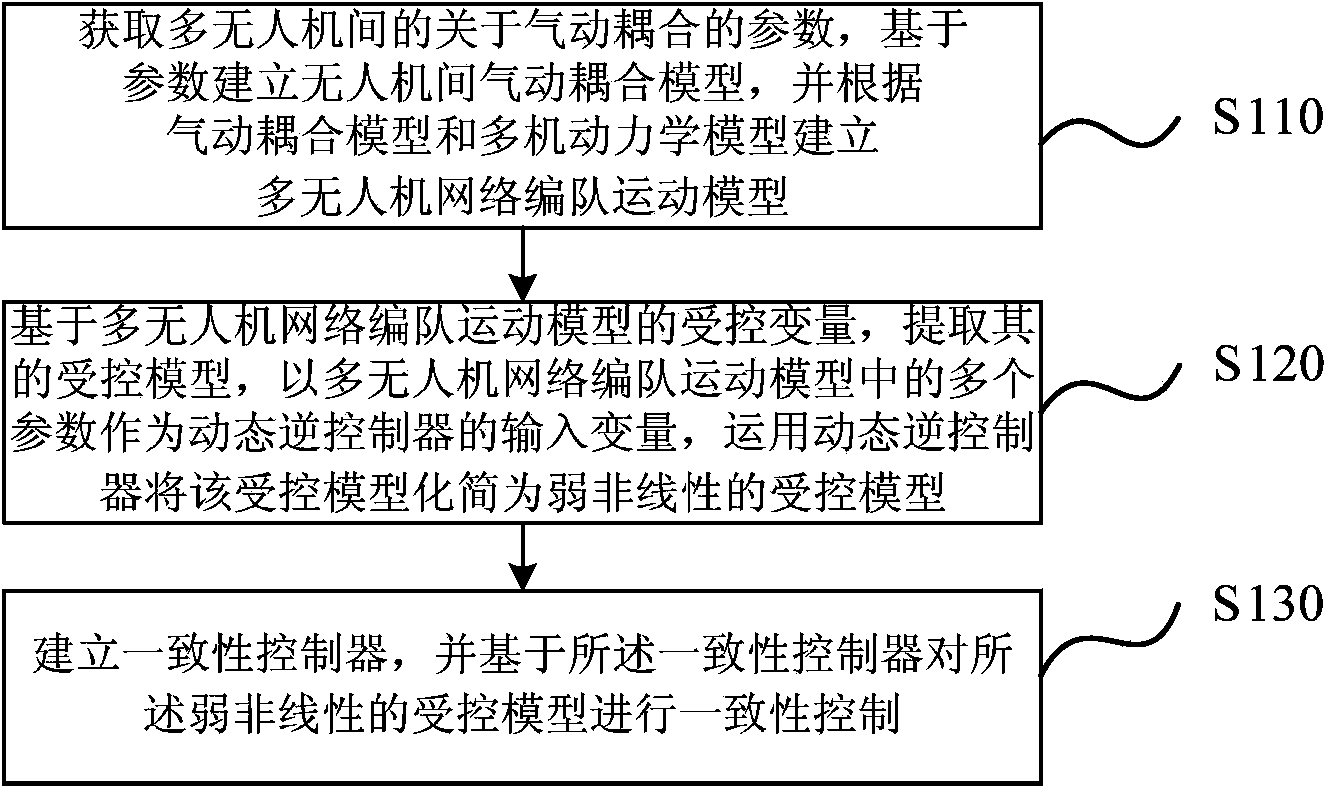
[0061] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
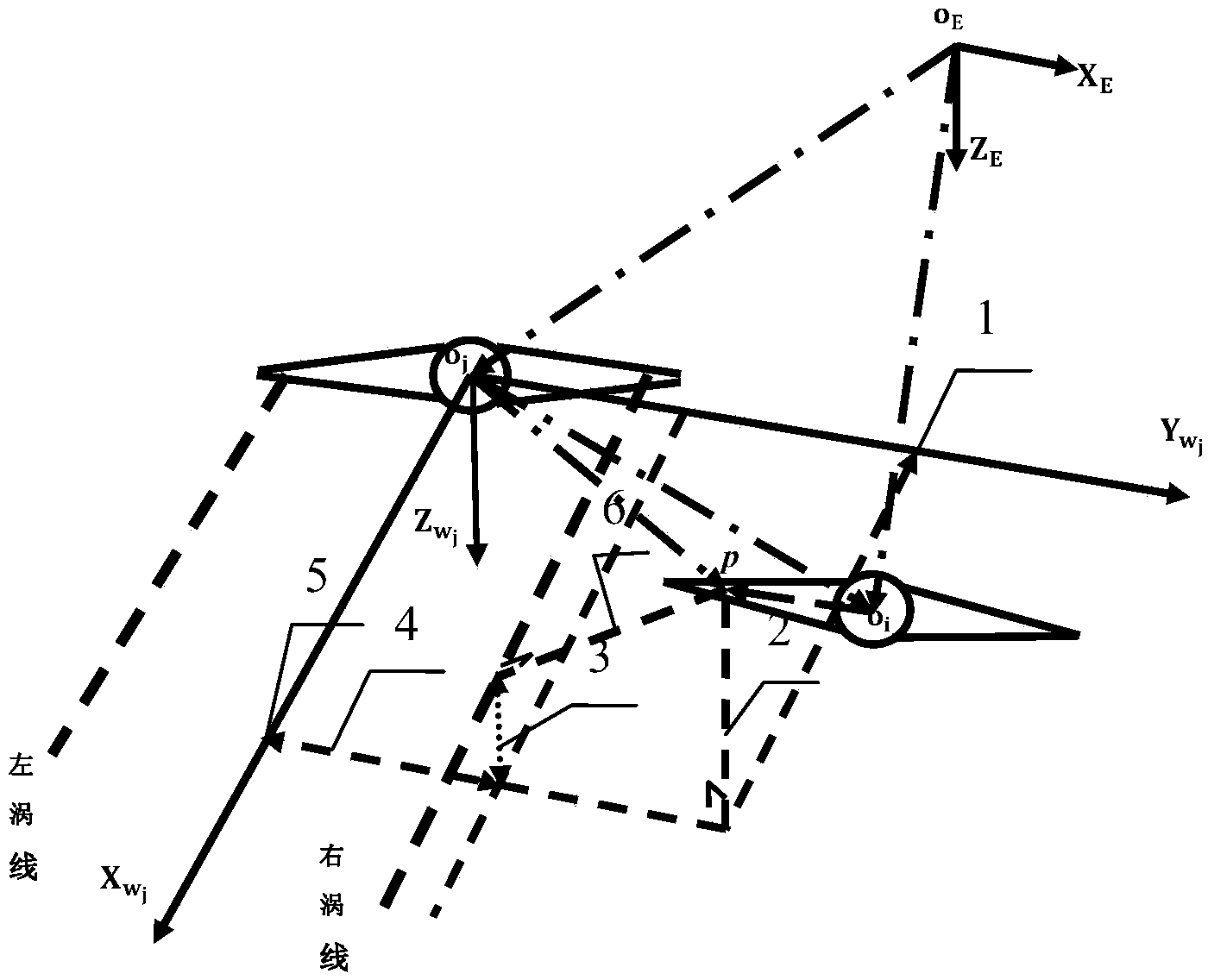
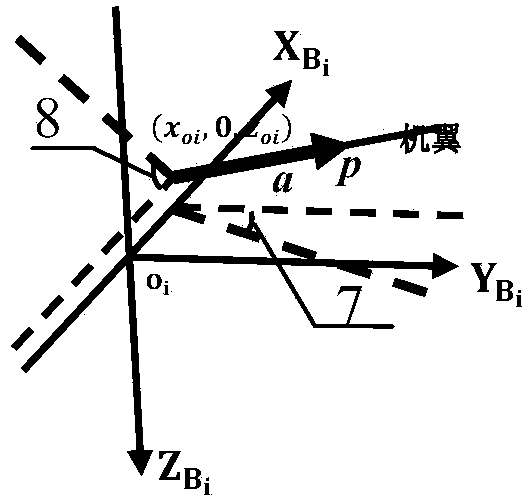
[0062] Before proceeding in detail, explain Figure 2 to Figure 5 The meaning represented by the reference signs 1 to 14 in:
[0063] 1- The x-axis coordinate of the point of action p projected in the adjacent airflow coordinate system;
[0064] 2- The z-axis coordinate of the point of action p projected in the adjacent airflow coordinate system;
[0065] 3- The vertical distance between the projection of the vortex line of the adjacent machine on the xoz plane and the x axis in the airflow coordinate system;
[0066] 4- The vertical distance between the xoy plane projection of the adjacent aircraft and the x axis in the airflow coordinate system;
[0067] 5- The y-axis coordinate of the point of action p projected in the adjacent airflow coordinate system;
[0068] 6- T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com