Greenhouse intelligent mobile robot vision navigation path identification method
A mobile robot, visual navigation technology, applied in character and pattern recognition, instruments, computer parts and other directions, can solve the problem that affects the autonomous navigation and operation performance of greenhouse mobile robots, segmentation effect affects the accuracy of navigation path recognition, uneven robustness It is beneficial to the subsequent image processing operations, the road boundary information is clear, and the segmentation quality is improved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
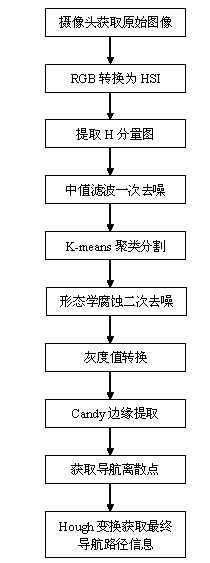
[0029] The invention provides a visual navigation path identification method for a mobile robot in a greenhouse. Aiming at a monocular vision mobile robot in a greenhouse environment, in order to solve the problem that the path identification of a mobile robot in a greenhouse is seriously affected by illumination information, it is proposed to use the RGB color space of the original image Converting to the HSI color space and extracting the H component in the greenhouse image which has less influence on the illumination information is a solution for the subsequent image processing object to effectively reduce the illumination influence. In addition, in order to solve the problem of poor real-time recognition of the navigation path of the current greenhouse mobile robot, the K-means algorithm is introduced in the image segmentation to perform clustering and segmentation processing on the image instead of the conventional threshold segmentation method, and the morphological erosio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com