Lane line detection method and device
A technology of lane line detection and right lane, applied in the field of intelligent transportation, can solve the problem of inability to obtain the correct lane line, and achieve the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
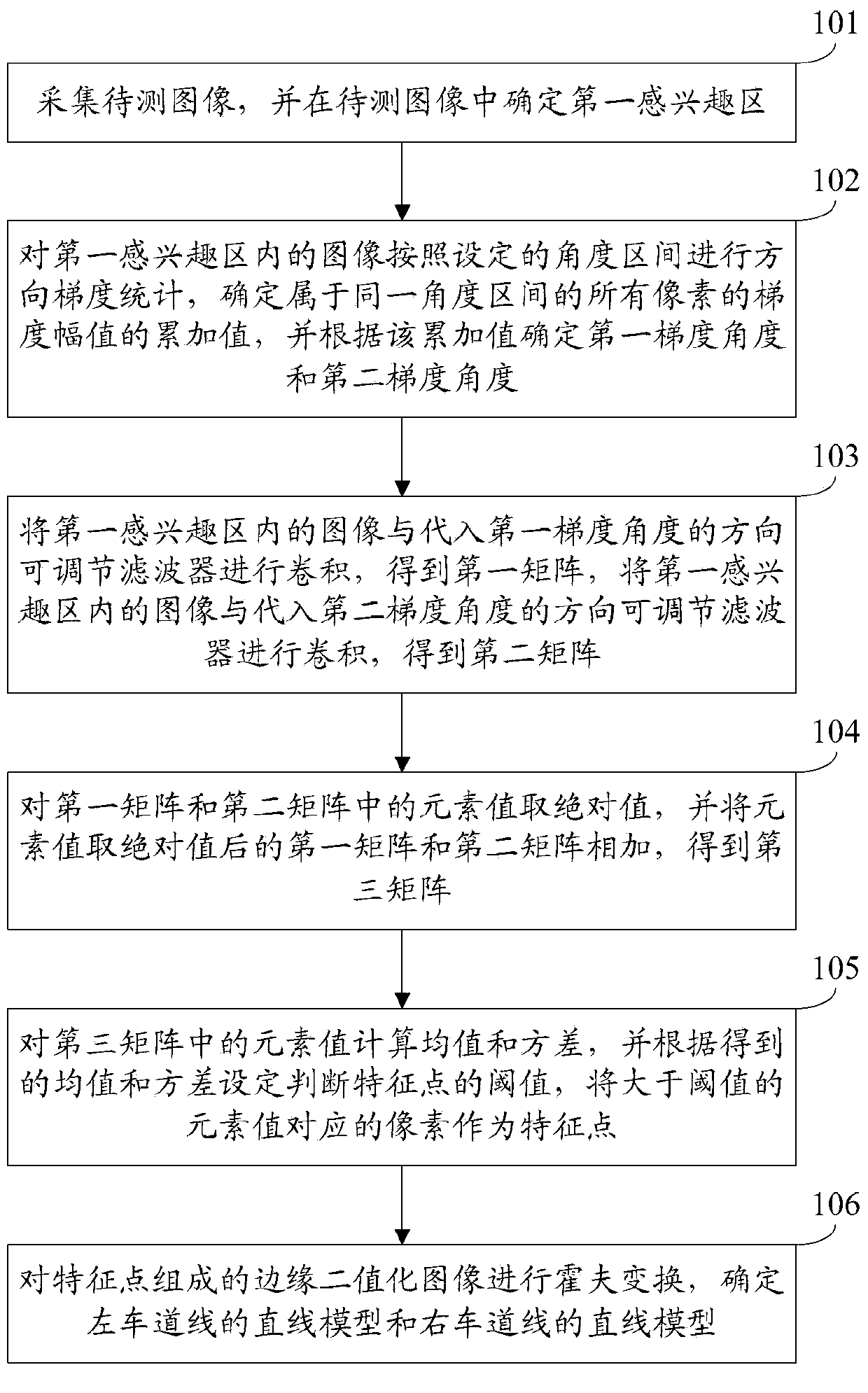
[0063] An embodiment of the present invention provides a lane line detection method, see figure 1 , the method includes:
[0064] Step 101: Collect an image to be tested, and determine a first region of interest in the image to be tested.
[0065] In this embodiment, the first region of interest is all or part of the area below the vanishing line of the ground plane and within the left and right boundaries in the field of view of the image-to-be-tested acquisition device.
[0066] Step 102: Perform directional gradient statistics on the image in the first region of interest according to the set angle interval, determine the cumulative value of the gradient magnitude of all pixels belonging to the same angular interval, and determine the first gradient angle and Second gradient angle.
[0067] In this embodiment, the first gradient angle belongs to 0-90°, and the second gradient angle belongs to 90°-180°.
[0068] Step 103: Convolute the image in the first region of interest...
Embodiment 2
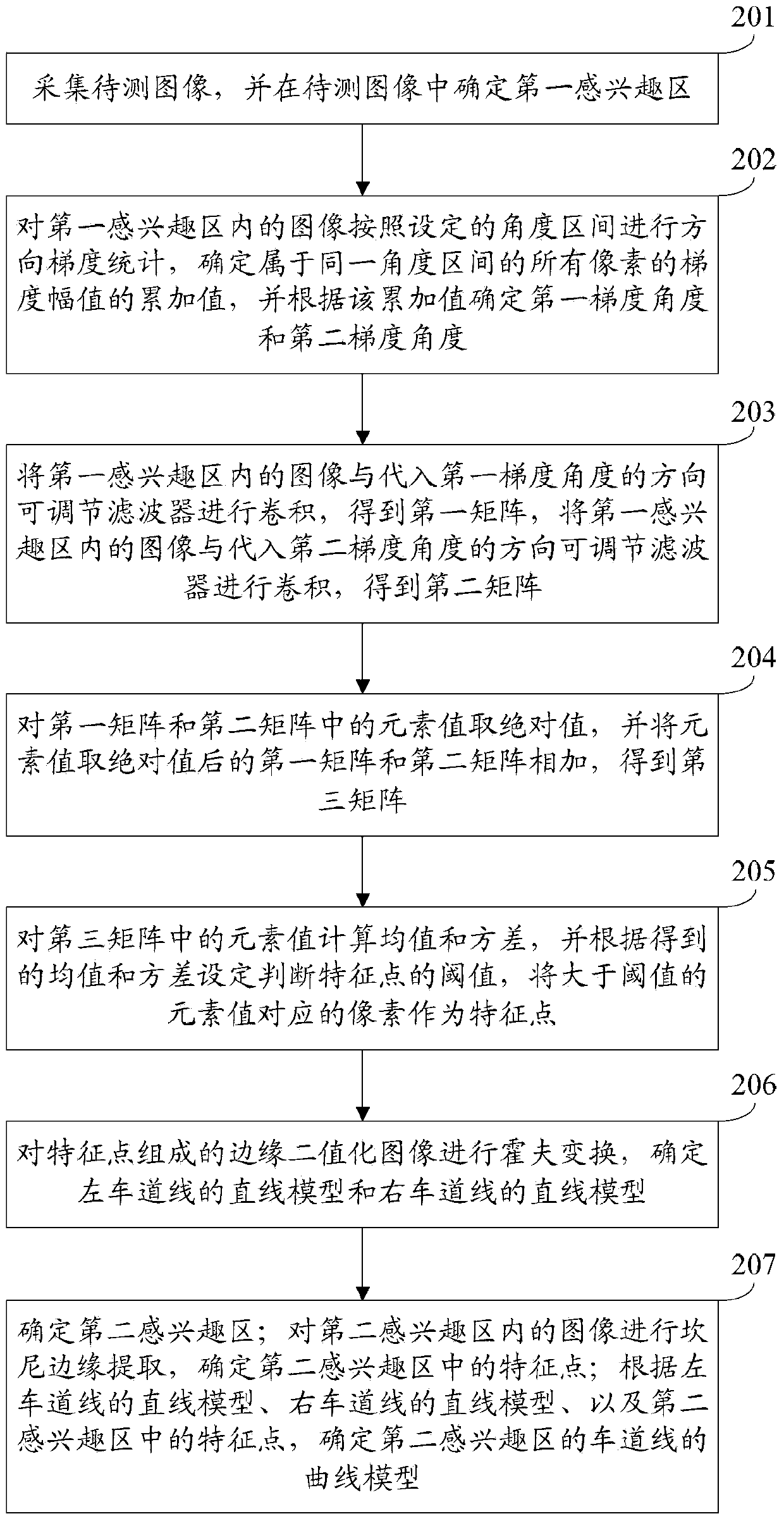
[0074] An embodiment of the present invention provides a lane line detection method, see figure 2 , the method includes:
[0075] Step 201: Collect an image to be tested, and determine a first region of interest in the image to be tested.
[0076] In this embodiment, the first region of interest is all or part of the area below the vanishing line of the ground plane and within the left and right boundaries in the field of view of the image-to-be-tested acquisition device.
[0077] In a practical application, the image to be tested is an image of the road condition in front of the vehicle, which can be collected by a camera installed inside or outside the vehicle.
[0078] Optionally, determining the first region of interest may include: taking the part below the vanishing line of the ground plane in the image to be tested as the first region of interest, reducing the time of lane line detection and improving the accuracy of lane line detection.
[0079] Preferably, determin...
Embodiment 3
[0117] An embodiment of the present invention provides a lane line detection device, see Figure 5 , applicable to a lane line detection method provided in Embodiment 1, the device includes:
[0118] The image acquisition module 301 is configured to acquire the image to be tested, and determine a first region of interest in the image to be tested, where the first region of interest is below the vanishing line of the ground plane and within the left and right boundaries in the field of view of the acquisition device of the image to be tested all or part of the area;
[0119] The gradient statistics module 302 is used to perform directional gradient statistics on the images in the first region of interest according to the set angle interval, determine the cumulative value of the gradient magnitudes of all pixels belonging to the same angular interval, and determine the first The gradient angle and the second gradient angle, the first gradient angle belongs to 0-90°, and the sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com