Small-sized unmanned rotary-wing aircraft high-precision control method based on adaptive neural network
An unmanned rotorcraft and neural network technology, applied in the field of autonomous control of unmanned robots, can solve the problem that the control performance is easily affected by external interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
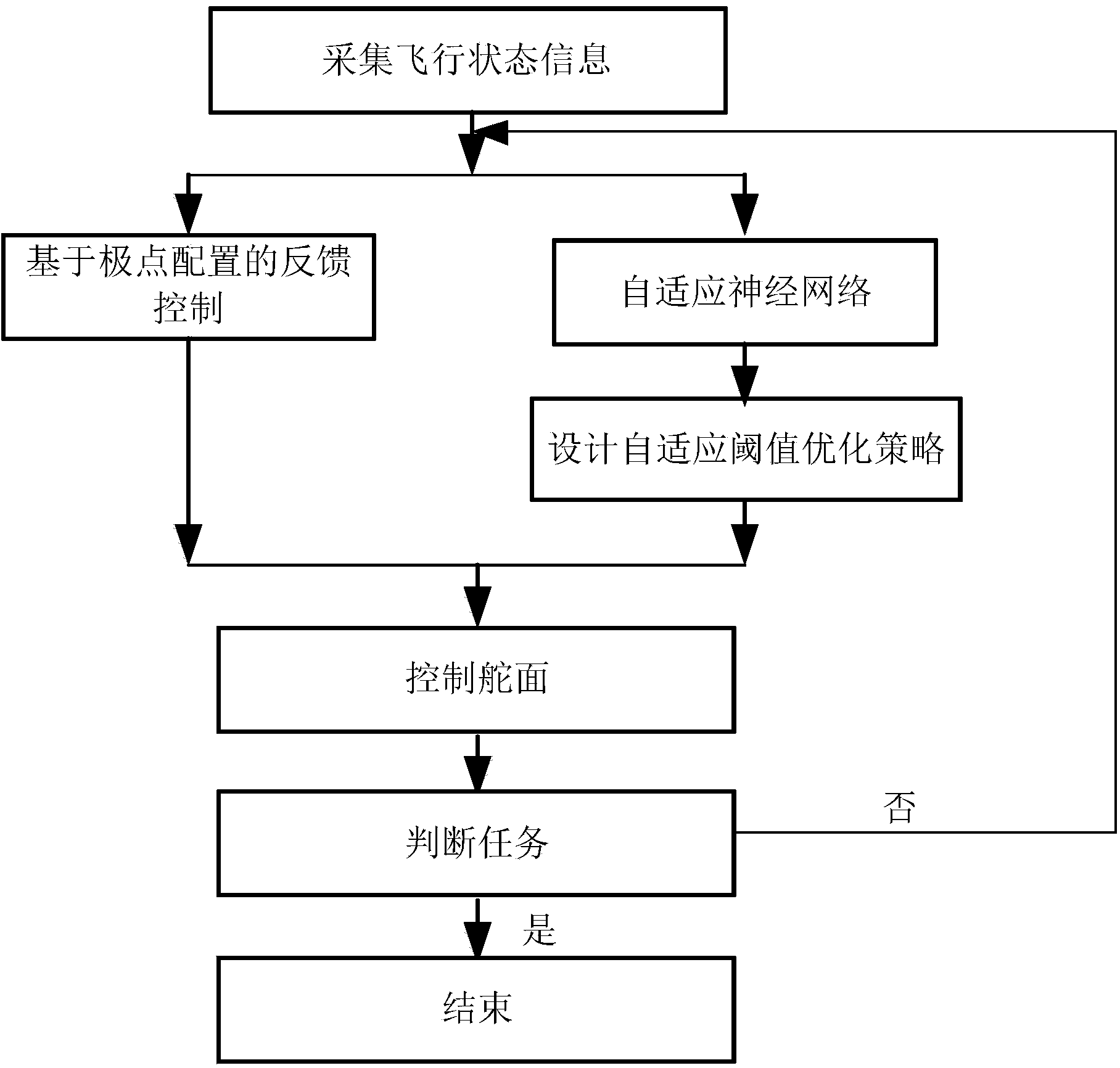
[0027] Such as figure 1 As shown, the specific implementation method of the present invention is as follows:
[0028] (1) Feedback control based on pole configuration
[0029] Based on the linearization method, the dynamic equation of the small unmanned rotorcraft is expressed as
[0030] x · ( t ) = Ax ( t ) + Bu ( t ) + d ( t )
[0031] Among them, the state variable x∈R n Represents the corresponding speed, angle and angular velocity information of the small unmanned rotorcraft system. Control variable u∈R m Respectively represent the lateral cyclic variable pitch, longitudinal cyclic variable pitch, total distance control signal and heading control signal of the small unmanned rotorcraft; A∈R n×n And B ∈ R n×m Are state transition matrix and control transition matrix of state variable and control variable respectively; d ∈ R m It means the bounded compound interference caused by wind disturbance, atmospheric turbulence, gro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com