Road detection method based on SIFT-COF feature optical flow
A road detection and optical flow technology, applied in image data processing, instrument, character and pattern recognition, etc., can solve the problems of undetectable obstacles and high price
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
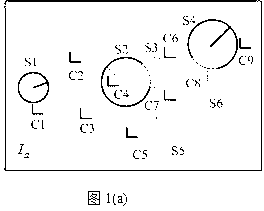
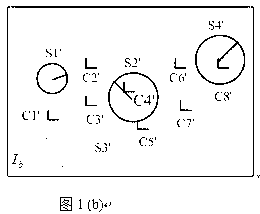
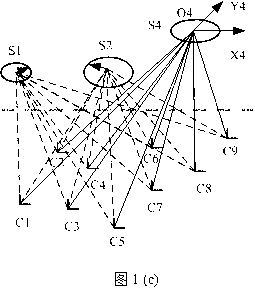
[0020] In the road environment, the biggest problem encountered in traditional optical flow calculation is the matching problem. Due to the uniform distribution of road gray levels, there are often multiple candidate windows corresponding to a certain window in the inter-frame image, and the window with the closest gray level may not be the matching window. The present invention extracts visual features that can be repeatedly detected in images, and calculates relative displacement through the matching of the features, which obviously has greater adaptability and robustness than traditional optical flow methods.
[0021] 1. SIFT-Harris composite feature construction
[0022] According to the characteristics of the intelligent vehicle application environment, the following factors are usually considered in the selection of features: first, the features should be evenly distributed in the image, which can ensure a relatively uniform optical flow; second, the features should be e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com