Multi-view-point computing and imaging method based on speckle-structure optical depth camera
A depth camera and computational imaging technology, applied in the field of image processing, can solve problems such as long time spent, unsatisfactory running speed results, and depth map matching deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
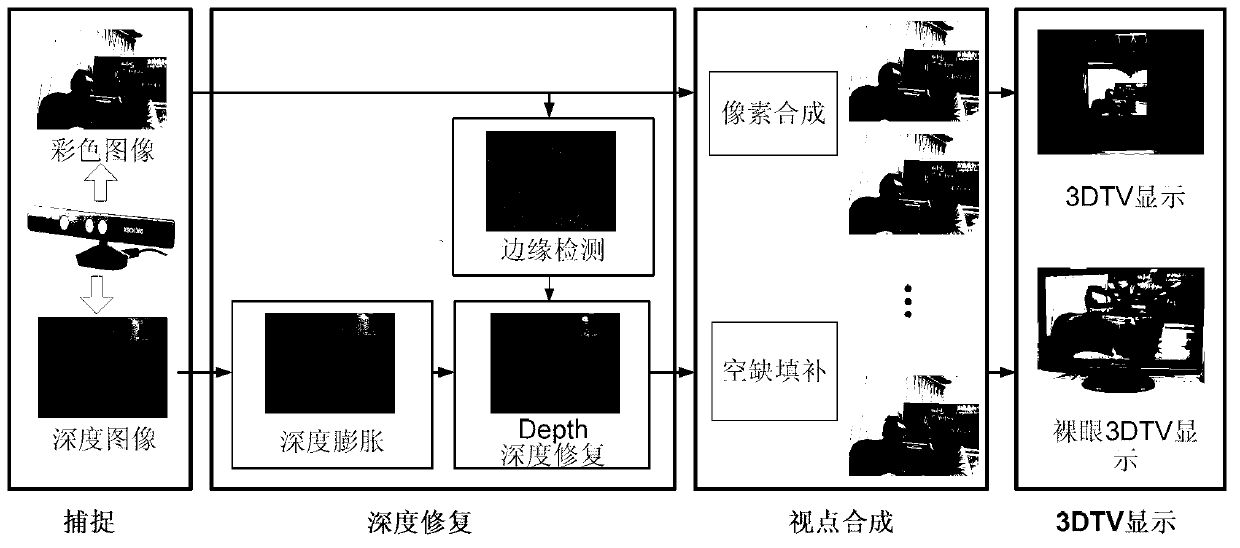
[0068] The present invention is based on the method of using Microsoft's human-computer interaction device Kinect to obtain a depth map and a color map, and perform multi-viewpoint imaging calculation and synthesis after processing respectively.
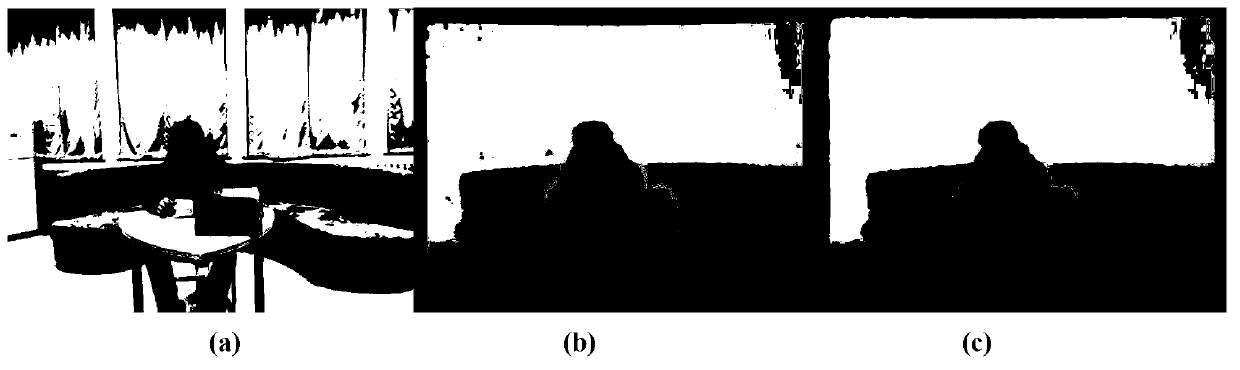
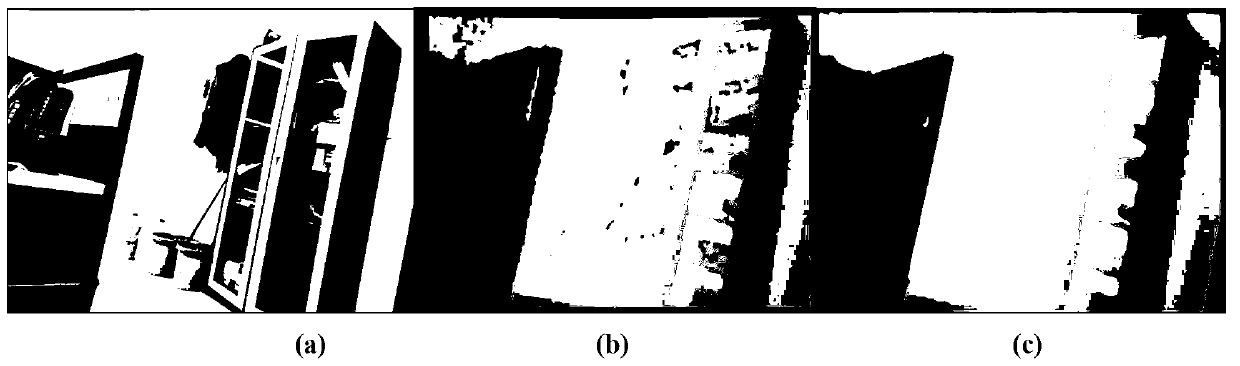
[0069] The present invention proposes a method for repairing a Kinect depth map, which takes about 10 seconds to act on a 640×480 image, has low computational complexity, and has a good effect of the repaired depth map.
[0070] After repairing the depth map, the present invention uses the depth map and the color map to perform viewpoint synthesis. Currently existing virtual view synthesis methods can be roughly classified into three types. The first is to use color image pair interpolation to generate a virtual image, and motion interpolation compensation is one of them. The second is to use depth images combined with color images. The third is to use the depth image to combine the color image and the class information hidden in i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com