Parameter Identification Method of Asynchronous Motor Based on Adaptive Compensation
A self-adaptive compensation, asynchronous motor technology, applied in the control of generators, motor generator control, electronic commutation motor control, etc., can solve the problems of poor generality of motor parameter identification methods, and achieve the effect of high accuracy and improved identification accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
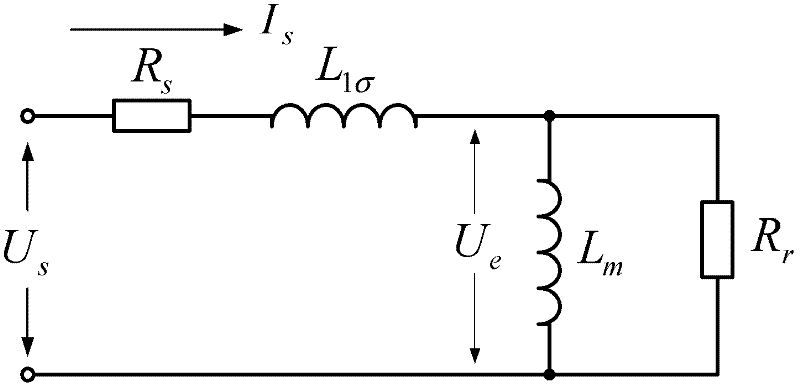
[0020] Specific implementation mode one: the following combination figure 1 Describe this embodiment, this embodiment is realized based on described motor and the inverter connected with this motor input end, and it comprises the following steps:
[0021] Step 1: Test the motor, obtain the DC bus voltage of the inverter and the PWM duty cycle of each phase, and reconstruct the reference input voltage of each phase of the motor;
[0022] Step 2: Calculate according to the reference input voltage of each phase of the motor reconstructed in step 1, and obtain the identification value R of the stator resistance value of each phase of the motor S ;
[0023] Step 3: Use the single-phase AC method to test the motor, control the amplitude and phase of the current injected into the motor through the current closed-loop PI regulator, obtain the DC bus voltage of the inverter and the PWM duty cycle of each phase at this time, and reconstruct the motor The reference input voltage U of e...
specific Embodiment approach 2
[0026] Specific Embodiment Two: This embodiment is a further description of Embodiment One. In step two, the identification value R of the stator resistance value of each phase of the motor is obtained. S The specific method is: use the DC method to test the motor, inject two DC currents of different sizes through the inverter between any two-phase windings of the motor, and the size of the DC current is controlled by the PI regulator. The two-phase winding current value I T1 , I T2 And the reference input voltage value U of the two-phase winding of the motor obtained by reconstruction T1 , U T2 , using the following formula:
[0027] U T 1 - ΔU I T 1 = U T 2 ...
specific Embodiment approach 3
[0041] Embodiment 3: This embodiment is a further description of Embodiment 1 or 2. The specific method for calculating and obtaining the real part and the imaginary part of the reference input voltage fundamental wave of each phase of the motor in step 3 is:
[0042] Set the reference value i of the AC current signal input by the PI regulator control ref * for: i ref * =I A sin(ωt),
[0043] where I A is the amplitude of the alternating current signal, ω is the angular frequency of the alternating current signal, t is the time,
[0044] The PI controls the output voltage signal u sα for:
[0045] u sα =U A sin(ωt+θ),
[0046] where U A is the voltage signal u sα The amplitude of , θ is the voltage signal u sα with the reference value of the current signal i ref * At the moment when the current phase of the motor is zero, the real part U of the fundamental wave of the reference input voltage of each phase of the motor is obtained by Fourier transform calculation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com