


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Discrete sliding mode repetitive control method for periodic servo system
A servo system and repetitive control technology, which can be applied to controllers with discontinuous output signals, electric controllers, etc., and can solve the problem of not many time-domain design methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
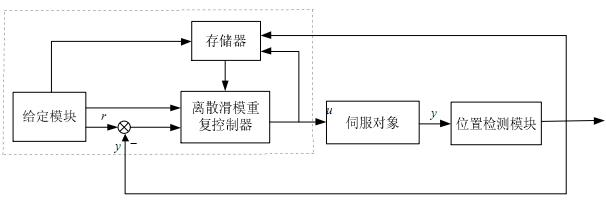
[0065] Refer to attached Figure 1-3
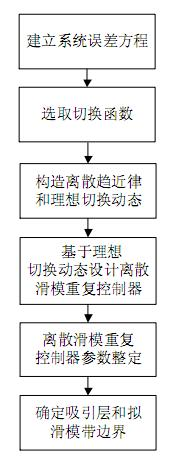
[0066] A discrete sliding mode repetitive control method suitable for a periodic servo system, comprising the following steps:
[0067] (1) Identify the differential equation model of the current servo system, and convert the differential equation model into a state space model:
[0068] ; Formula 1
[0069] in: Indicates that the servo system is in The tracking error variable at time, for control variable at time, for the servo system in Interference signal at time (satisfies the matching condition), is the servo system matrix, is the control coefficient of the system;
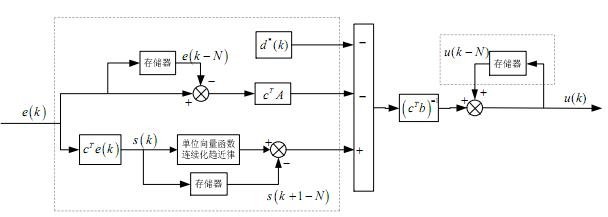
[0070] (2) Select the linear switching function as , is the gain parameter, The selection of determines the convergence and convergence speed of the system on the sliding surface;
[0071] (3) Construct the discrete reaching law: ;Formula 2
[0072] Where: parameters As the approach velocity exponent, choose , which determines that the ...
Embodiment 2
[0117] refer to Figure 4-8 , with the linear motor as the controlled servo system, further illustrate the present invention:
[0118] Figure 4 It is a structural block diagram of the linear servo system provided by the present invention. Considering the position servo, the speed loop and the current loop adopt PI control, and the setting has been completed, so it is necessary to design a position controller (that is, a discrete sliding mode repetitive controller). The linear servo system used in this embodiment includes a linear motor body 501 , a control module 502 , a power driver 503 , a grating ruler detection module 504 , a reference signal setting module 505 , an information storage module 506 , and a driving module 507 . Wherein, the reference signal given module 505, the control module 502 and the information storage module 506 are realized by the DSP control card 508; the PI controller of the speed loop and the current loop and the power driver 503 are included in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com