Real-time stereoscopic vision implementation method based on FPGA
A technology of stereo vision and implementation method, applied in stereo systems, image data processing, instruments, etc., can solve problems such as inability to meet real-time requirements, and achieve the effect of reducing the false matching rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
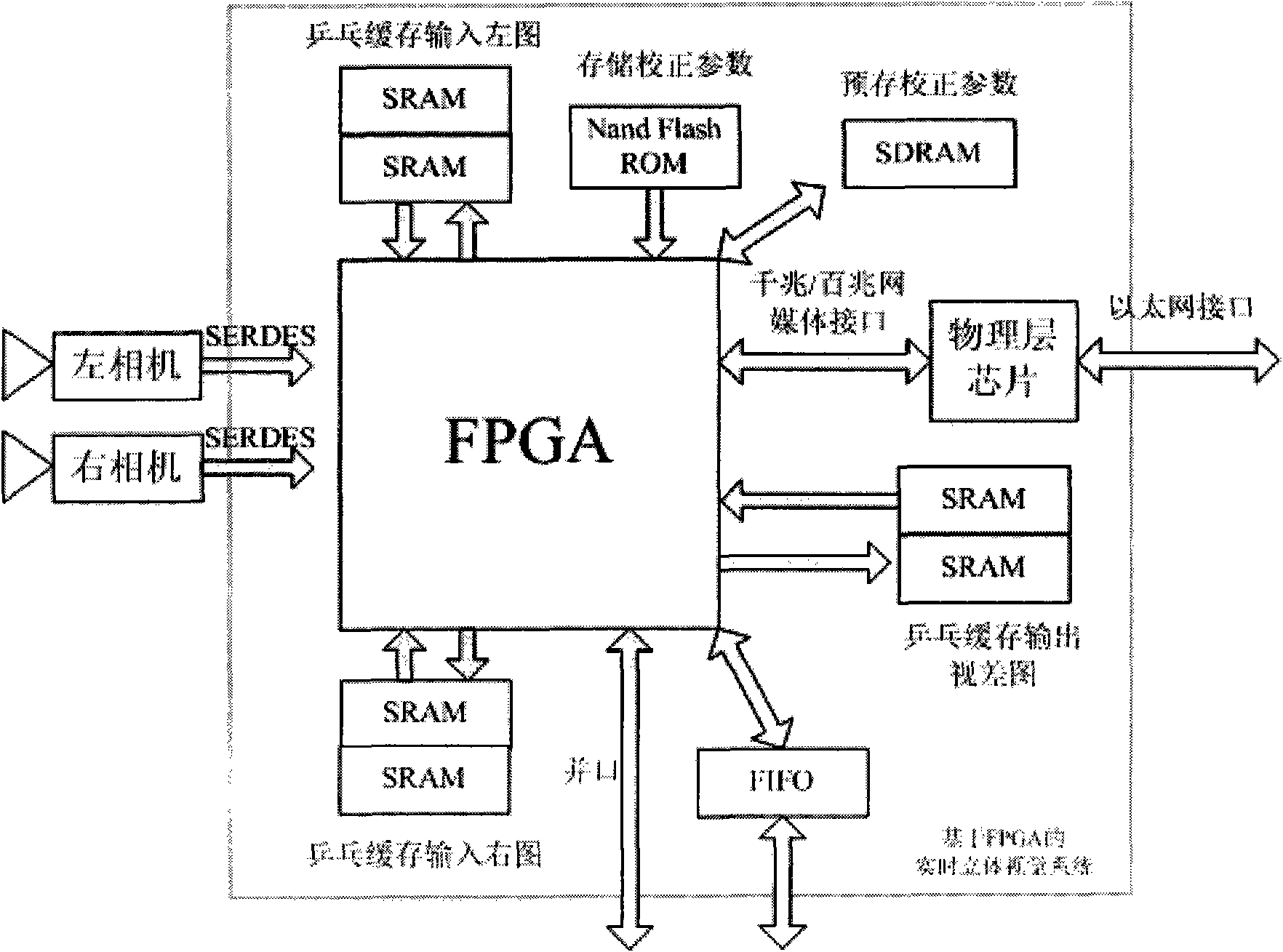
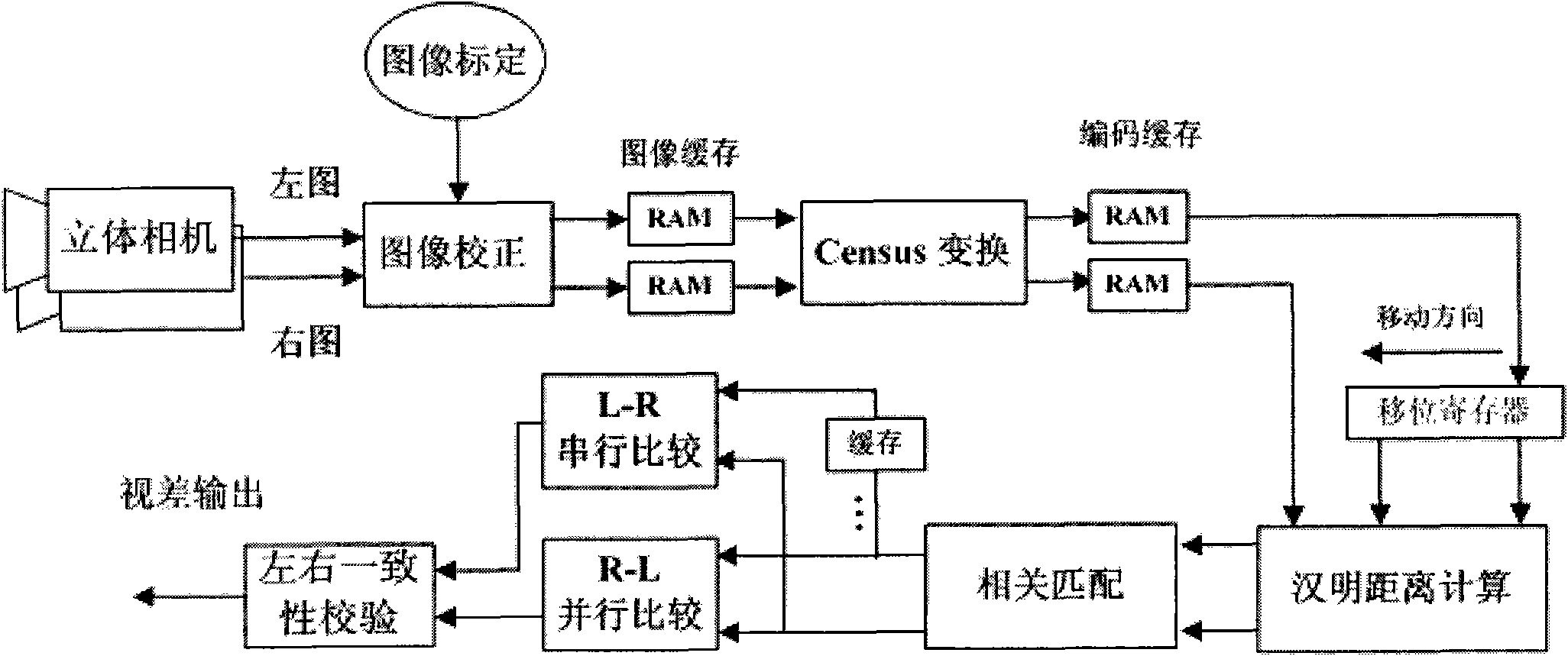
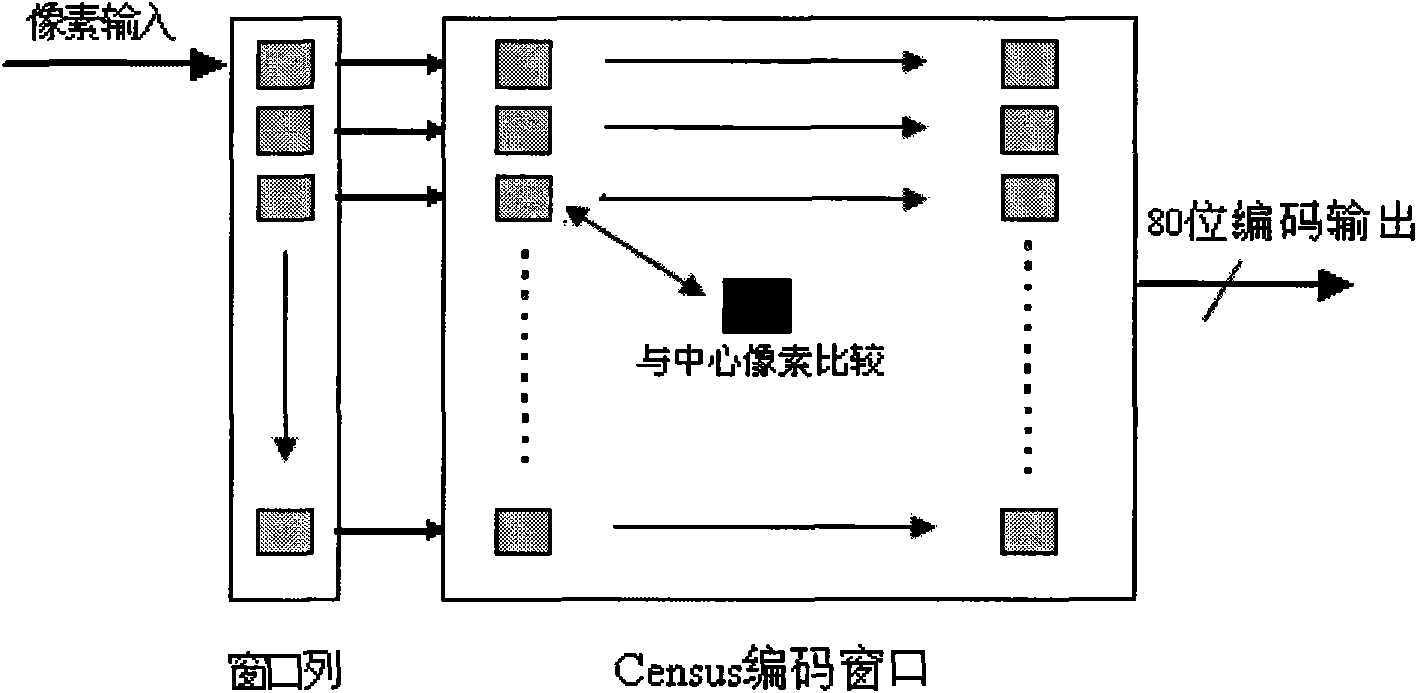
[0057] In order to meet the real-time and accuracy requirements of autonomous vehicles to obtain 3D data, the current stereo vision implementation method uses images with a resolution of 512×512, a disparity search range of 64 pixels, a 9×9 pixel size Census transform window and a 9× The correlative matching window of 9 pixel sizes; Stereoscopic vision realization method of the present invention operates on the described real-time stereoscopic vision system based on FPGA, under the situation that system clock is 40MHz, can reach the processing speed of more than 30 frames per second, It exceeds the frequency that the human eye can distinguish, and is fully capable of real-time parallax calculation and high-speed navigation requirements of autonomous vehicles. Because the design adopts a structured implementation method, it has the potential to upgrade to higher resolution images and larger disparity search ranges under the condition of abundant hardware resources.
[0058] In ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com