Autonomous navigation and guidance control programming dispatching method for small celestial body impact probing
A technology of autonomous navigation and dispatching method, applied in the direction of integrated navigator, aerospace vehicle guidance device, etc., can solve the problems of poor scalability, numerous tasks, poor replaceability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
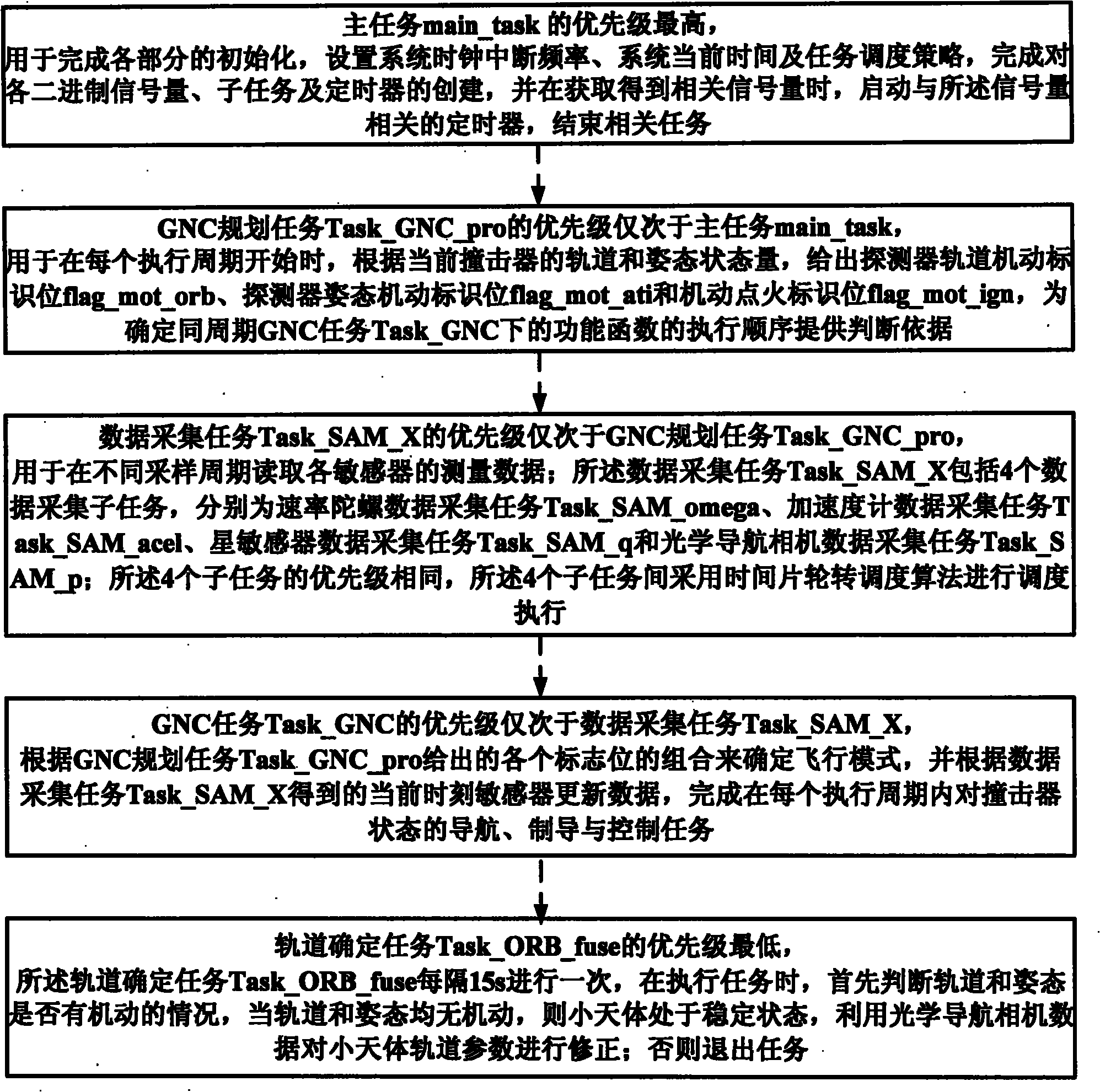
[0012] Specific implementation mode one, combination figure 1 Explain this embodiment, the method for planning and scheduling of autonomous navigation and guidance control for collision detection of small celestial bodies, which is implemented by the main task main_task and four subtasks. The four subtasks are GNC planning task Task_GNC_pro, data acquisition task Task_SAM_X, GNC task Task_GNC and orbit. Determine the task;
[0013] The main task main_task has the highest priority. It is used to complete the initialization of each part, set the system clock interrupt frequency, system current time and task scheduling strategy, complete the creation of each binary semaphore, subtask and timer, and get the relevant When the semaphore is used, start the timer related to the semaphore and end the related task;
[0014] The priority of the GNC planning task Task_GNC_pro is second only to the main task main_task, which is used to give the detector orbit maneuver flag flag_mot_orb and the ...
specific Embodiment approach 2
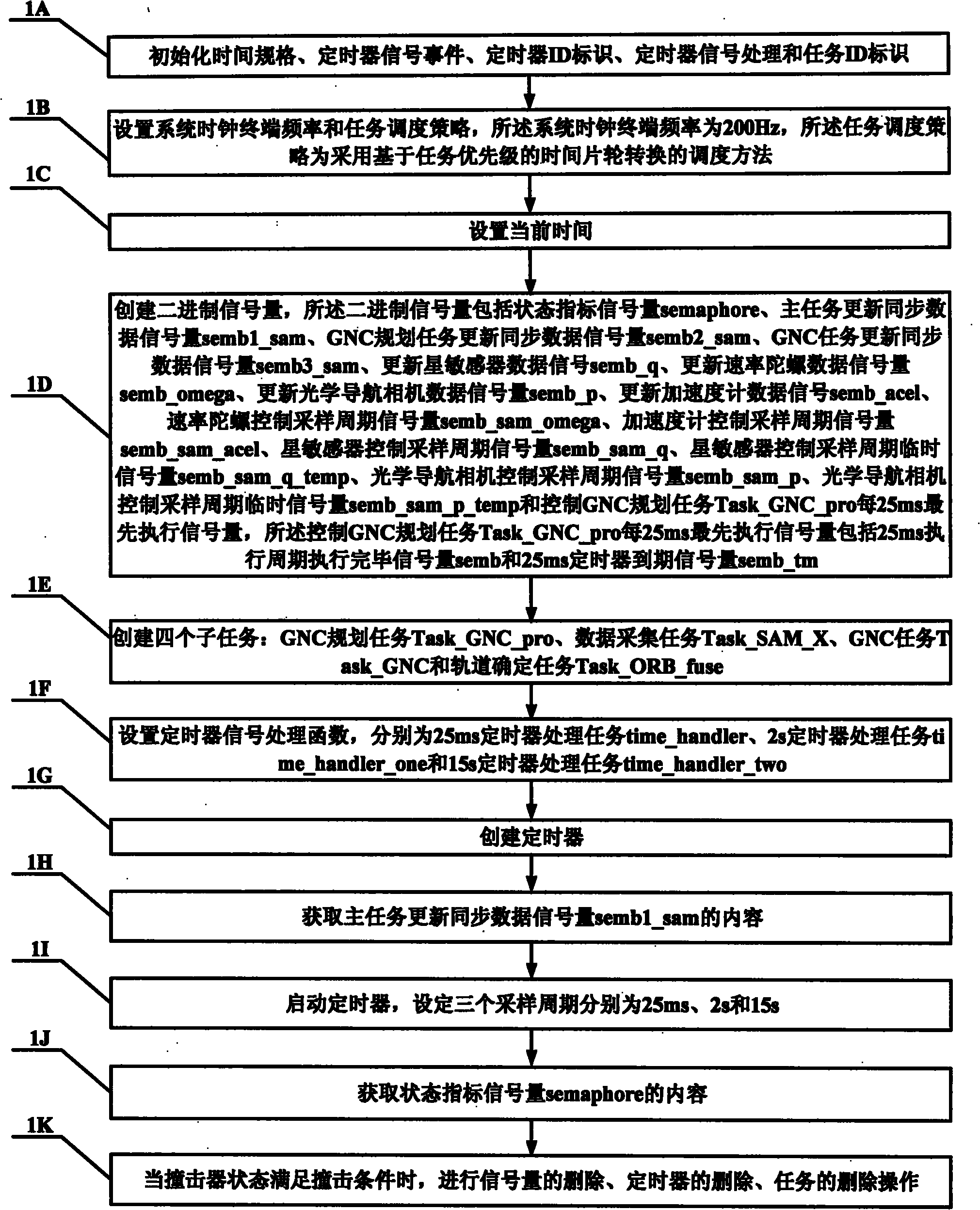
[0020] Specific implementation mode two, combination figure 2 To explain this embodiment, this embodiment is a further explanation of the main task main_task in specific embodiment 1: The working process of the main task main_task is as follows:
[0021] Step 1A, initialization time specification, timer signal event, timer ID identification, timer signal processing and task ID identification;
[0022] Step 1B, setting the system clock terminal frequency and task scheduling strategy, the system clock terminal frequency is 200 Hz, and the task scheduling strategy is a scheduling method using time slice round conversion based on task priority;
[0023] Step 1C, set the current time;
[0024] Step 1D. Create a binary semaphore. The binary semaphore includes the state indicator semaphore, the master task update synchronization data semaphore semb1_sam, the GNC planning task update synchronization data semaphore semb2_sam, the GNC task update synchronization data semaphore semb3_sam, and th...
specific Embodiment approach 3
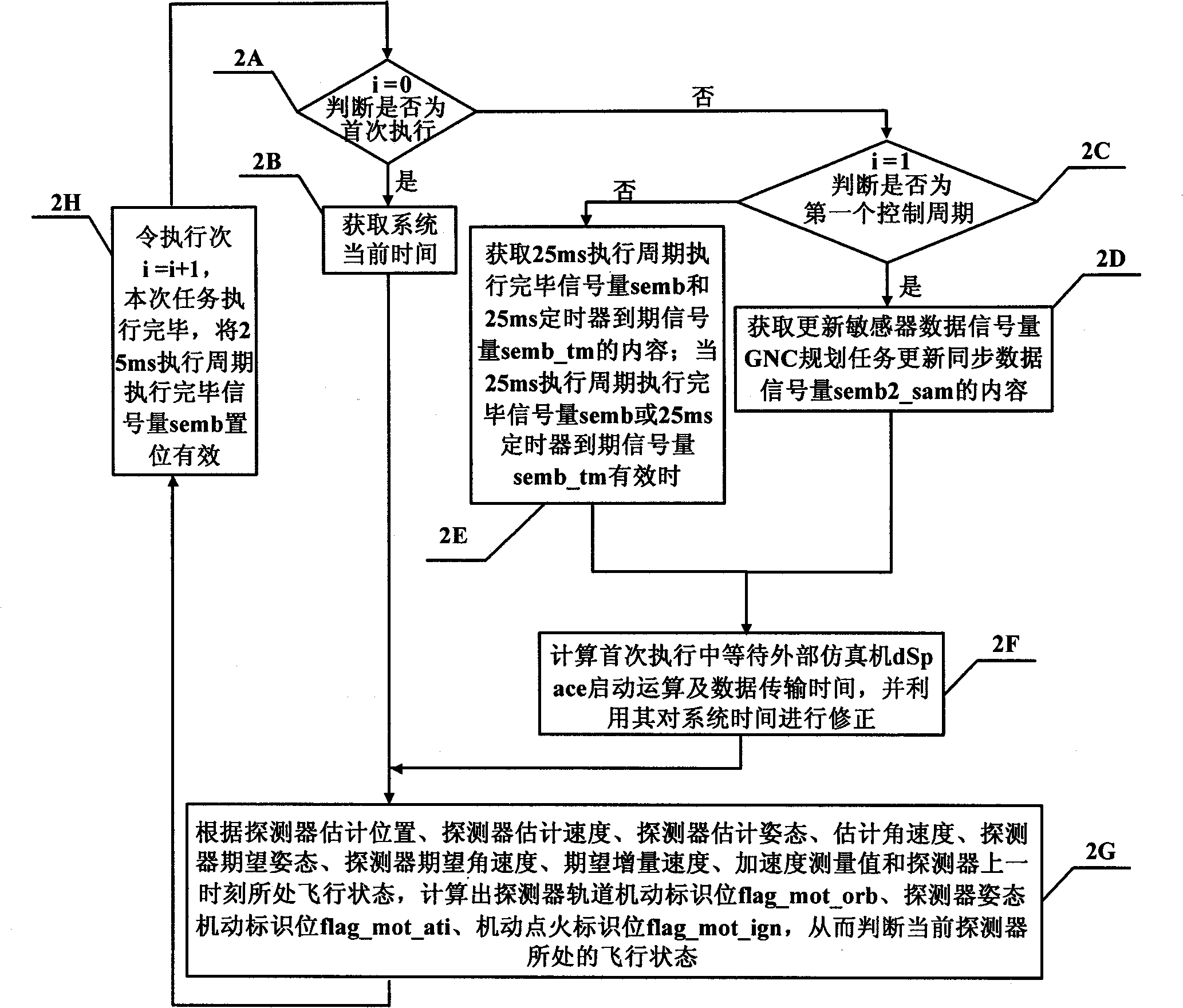
[0035] Specific implementation mode three, combination image 3 To explain this embodiment, this embodiment is a further explanation of the GNC planning task Task_GNC_pro in the specific embodiment 1: The working process of the GNC planning task Task_GNC_pro is as follows:
[0036] Step 2A, judge whether it is the first execution, use i to indicate the number of executions, if it is the first execution, use i=0 to indicate, and execute step 2B; if it is not the first execution, execute step 2C;
[0037] Step 2B, obtain the current time of the system; then execute step 2G;
[0038] Step 2C, judge whether it is the first execution cycle, that is, judge whether i is 1; if yes, go to step 2D; if not, go to step 2E;
[0039] Step 2D: Obtain the content of the update sensor data semaphore GNC planning task update synchronization data semaphore semb2_sam; then perform step 2F;
[0040] Step 2E. Obtain the content of the 25ms execution cycle completion semaphore semb and the 25ms timer expirati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com