Novel flexible foot system of human-imitated robot
A humanoid robot and flexible foot technology, applied in the field of humanoid robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
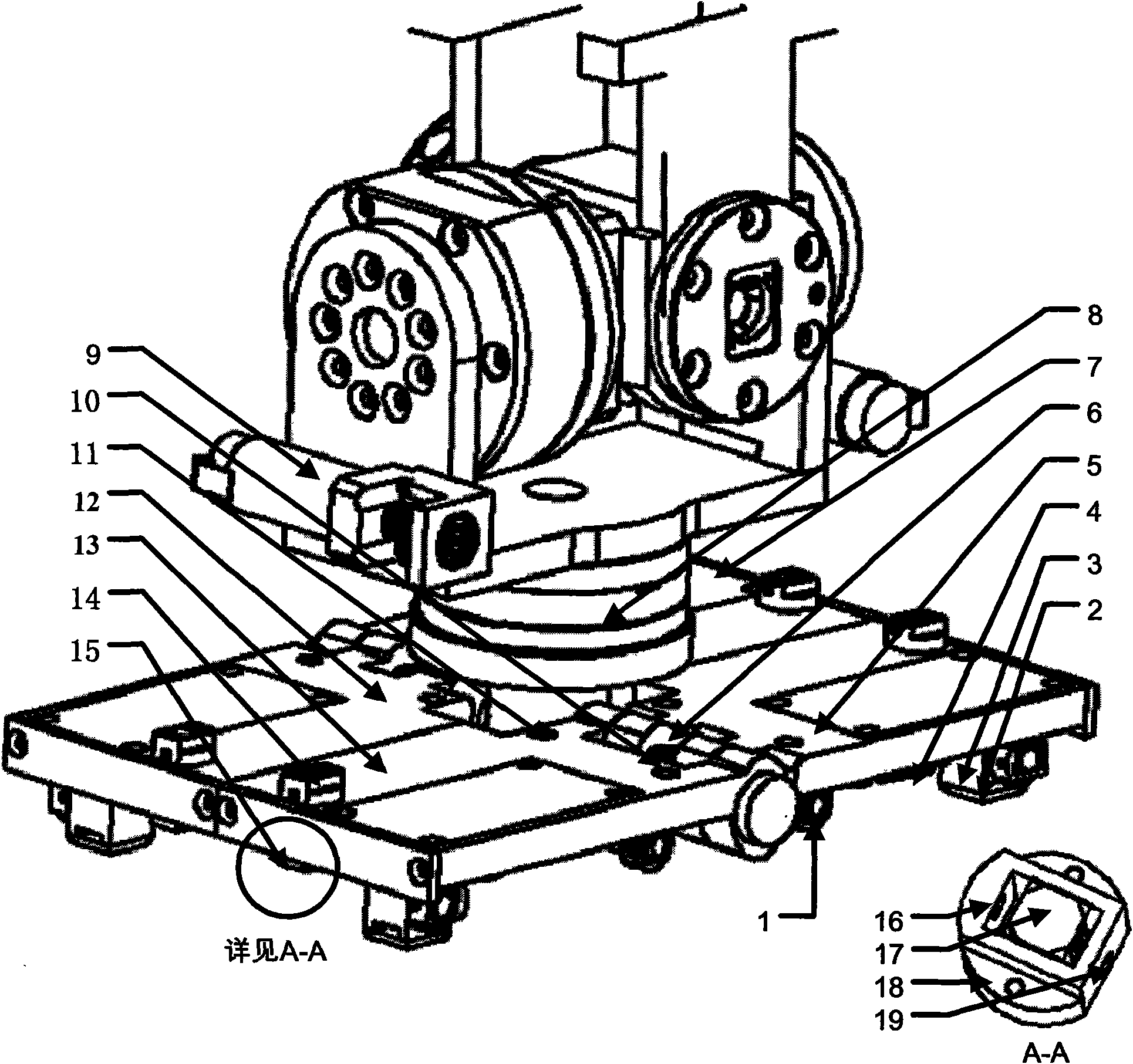
[0029] see figure 1 , a flexible foot system for a humanoid robot, comprising sole plates 5, 7, 12, 13, a supporting spindle 8, and a micro-motor drive system 9. Flexible cable passes through by micro-motor drive system, penetrates by hole 10,11, is consolidated in flexible cable buckle 14,15 on the sole plate. Foot sole plate 5,7,12,13 front bottom respectively is provided with a slide block 3, must keep certain tension force because of soft cable, slide block 3 directly links to each other with spring damping system 4 by hook, realizes single flexible cable driving mode. In addition, a force sensor 2 is provided in the inner cavity of the slider 3, and the slider 3 can move forward and backward, and the ground information is fed back through the force sensor to seek the optimal contact point ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com