Control method and control device for hydraulic shovel scraper bucket
A technology for hydraulic excavators and control methods, applied to mechanically driven excavators/dredgers, etc., can solve the problems that the ditch bottom or the level of the site cannot meet the construction requirements, affect the construction quality, and are not accurate enough to achieve simplification Difficulty of operation, saving input cost, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0031] Embodiment one: a kind of control method of hydraulic excavator bucket movement, comprises the following steps:
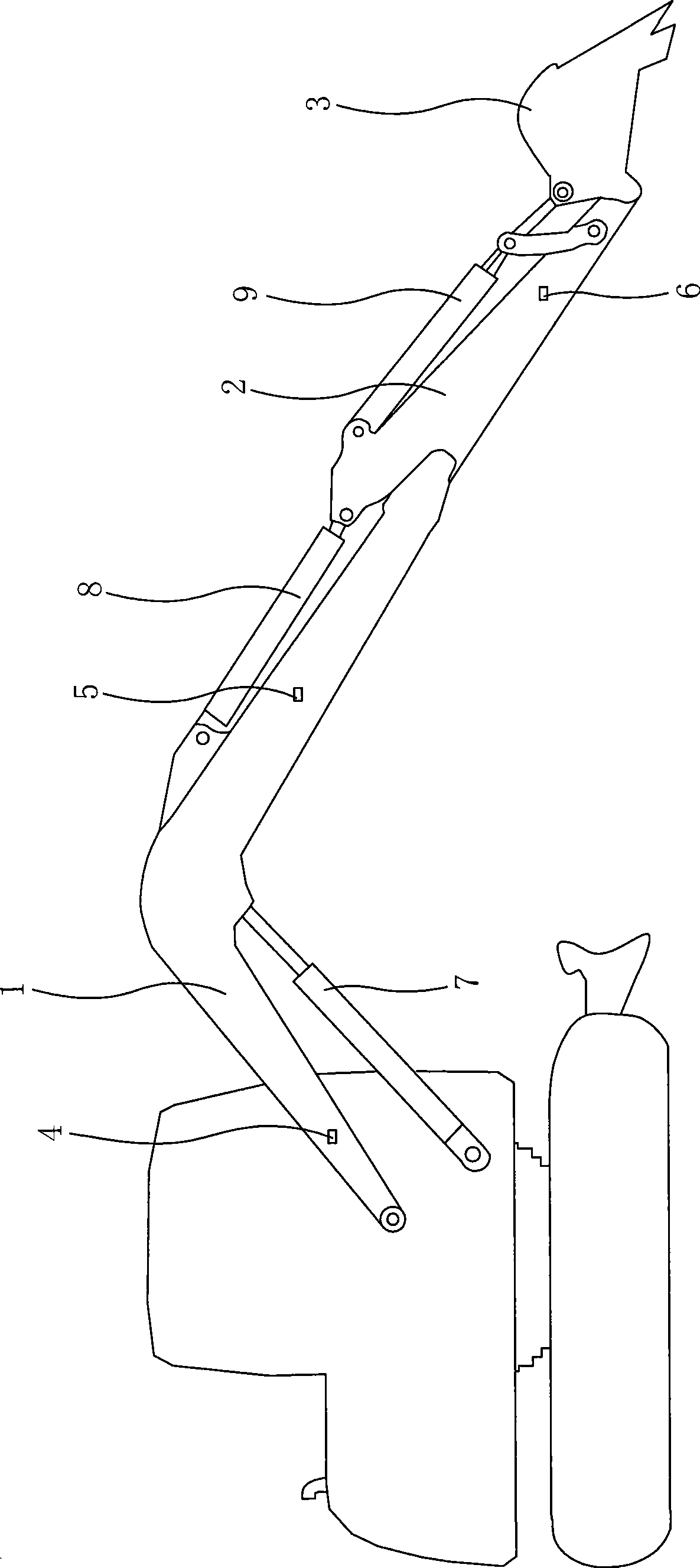
[0032] (1) The hinge angle value between the boom 1, arm 2 and bucket 3 of the current working device is measured by the sensor;
[0033] (2) input the included angle value obtained in the step (1) into a programmable controller with a program, and calculate the moving distance value of each working device required to keep the bucket moving horizontally;
[0034] (3) According to the moving distance value calculated in step (2), the oil supply quantity of the oil cylinder controlling the moving distance of each working device is converted, and delivered to each working device;
[0035] (4) Repeat step (1) until the horizontal operation is completed.
[0036] see figure 1 As shown, in order to realize the above control method, the control device includes an angle sensor, a programmable controller with a software program, and a proportional valve for control...
Embodiment 2
[0038] Embodiment two: a kind of control method of hydraulic excavator bucket motion, comprises the following steps:
[0039] (1) The length signal value of the piston rod of the oil cylinder on each part of the boom 1, arm 2 and bucket 3 of the current working device is measured by the sensor;
[0040] (2) input the length signal value obtained in the step (1) into a programmable controller with a program, and calculate the required oil cylinder piston rod length change value to keep the bucket moving horizontally;
[0041](3) According to the change value calculated in step (2), the oil supply quantity of the oil cylinder controlling the moving distance of each working device is converted, and delivered to each working device;
[0042] (4) Repeat step (1) until the horizontal operation is completed.
[0043] In order to realize the above-mentioned control method, the control device includes a length sensor, a programmable controller with a software program, and a proportion...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com