Mobile robot grating map creating method of real-time data fusion
A mobile robot and grid map technology, applied in physical realization, biological neural network model, road network navigator, etc., can solve the problems of overly sensitive error information, high misjudgment rate, and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
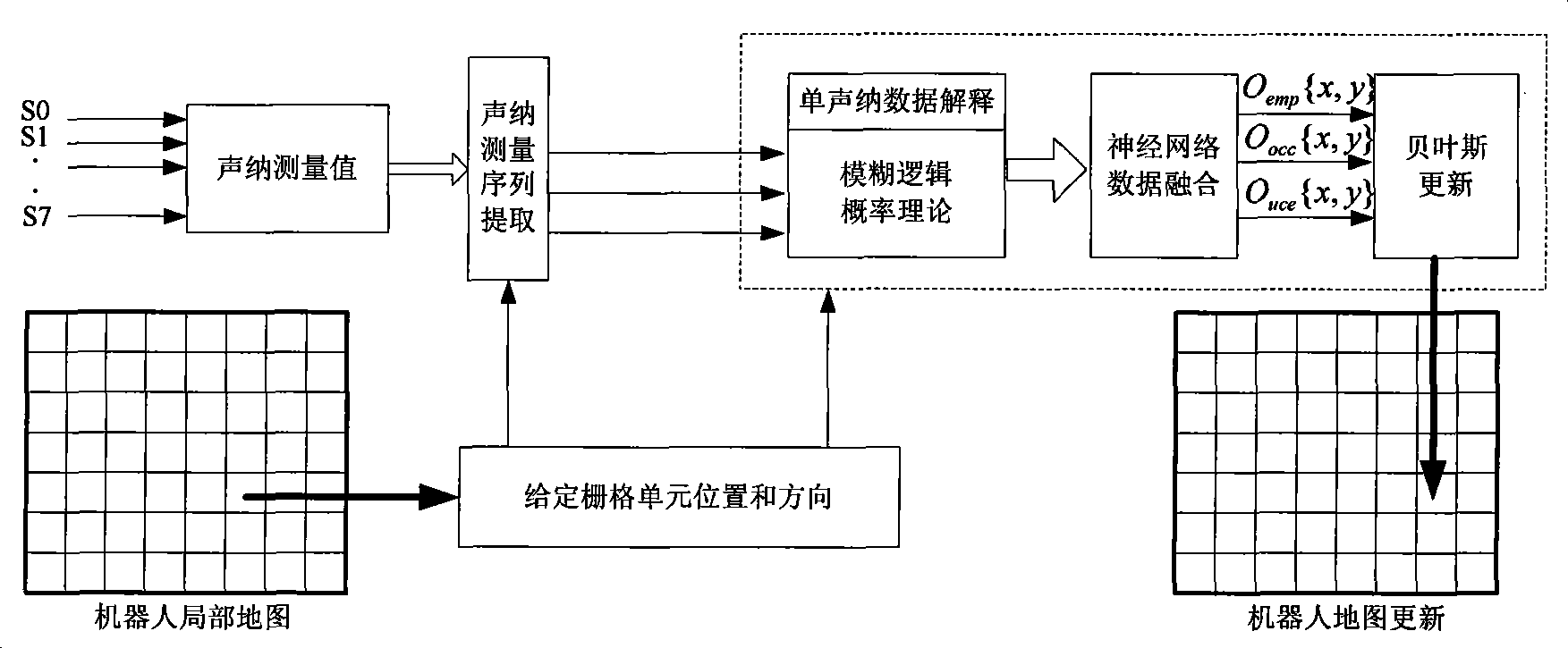
[0055] The present invention proposes a real-time data fusion mobile robot grid map creation method, the system schematic diagram is as follows figure 1 shown. The neural network is used to fuse the uncertainty of sonar data explained by probability theory and fuzzy logic, and the influence of the spatial correlation of multiple sonars on the state of the same grid is considered to establish an environmental grid map.
[0056] figure 1 Among them, S0, S1, ..., S7 are the ranging values of the sonar sensors installed on the front end of the mobile robot, and O emp {x, y}, O occ {x, y}, O uce {x, y} are the currently calculated grid idle probability, obstacle probability and uncertain state probability, respectively.
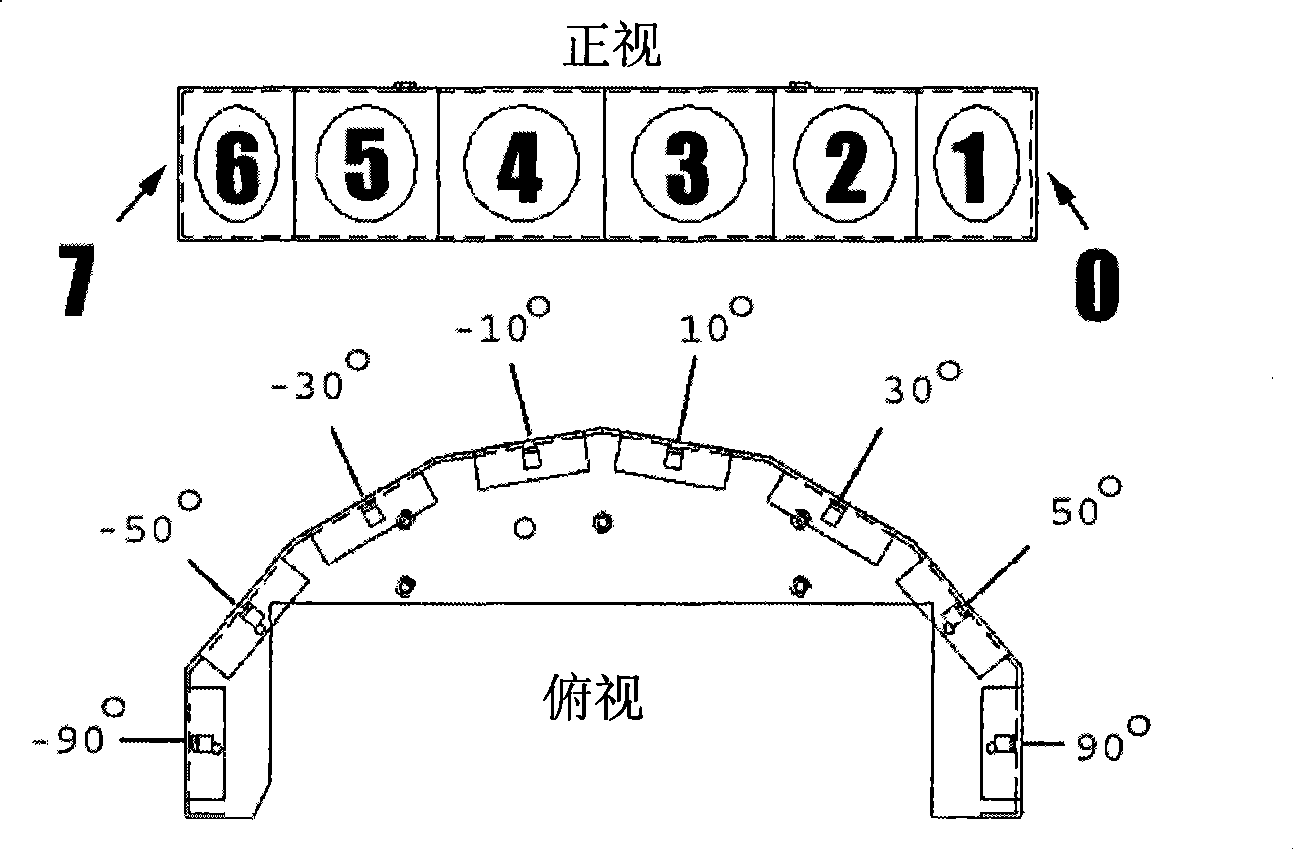
[0057] The mobile robot uses ultrasonic ranging sensors to complete environment modeling, and eight sonar ranging sensors are installed on its front end. figure 2 The positions of the sonar sensors of the mobile robot are: ±10°, ±30°, ±50° and ±90°, which ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com