Low orbit satellite multi-sensor fault tolerance autonomous navigation method based on federal UKF algorithm
A low-orbit satellite, multi-sensor technology, used in navigation, mapping and navigation, integrated navigator and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
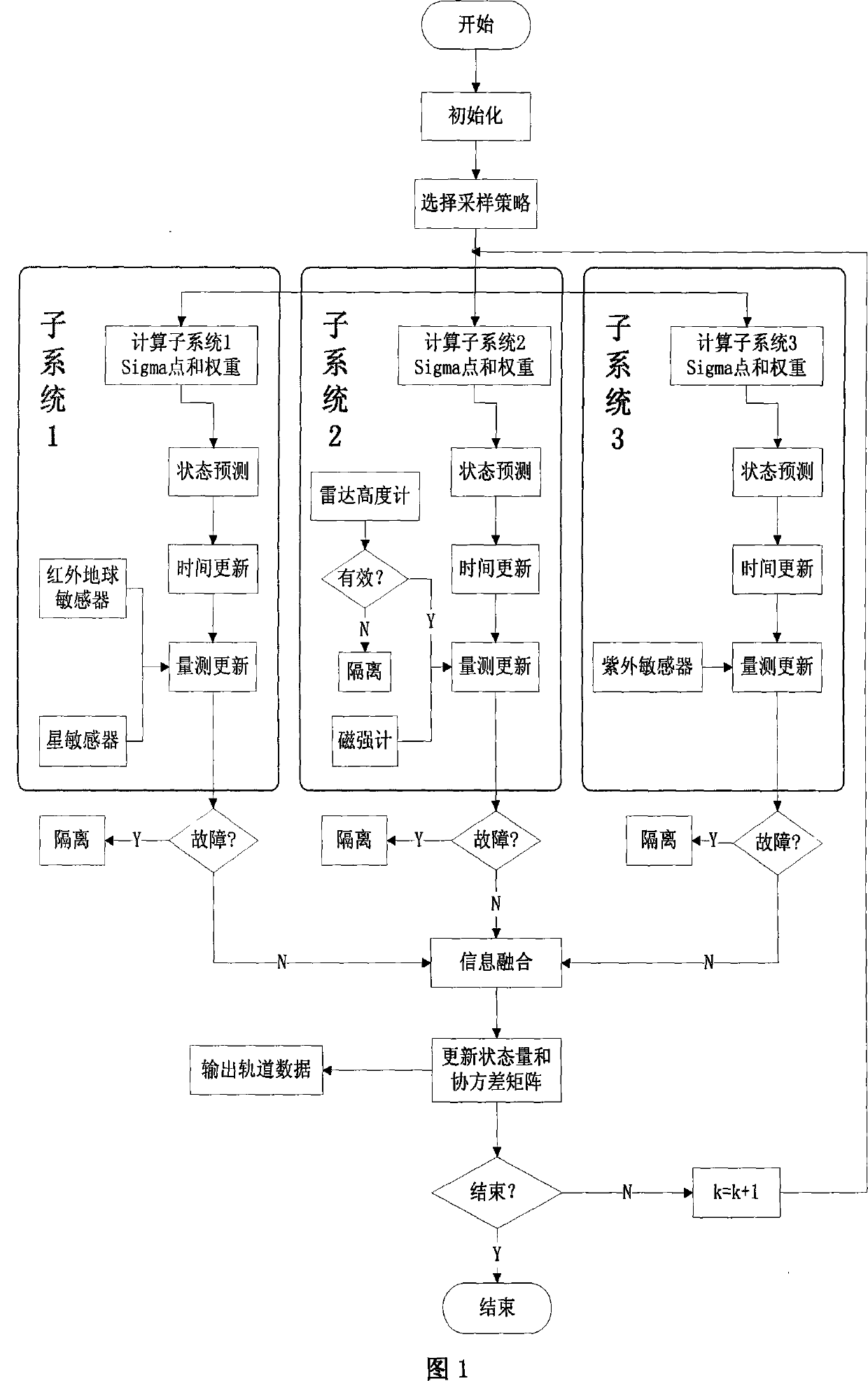
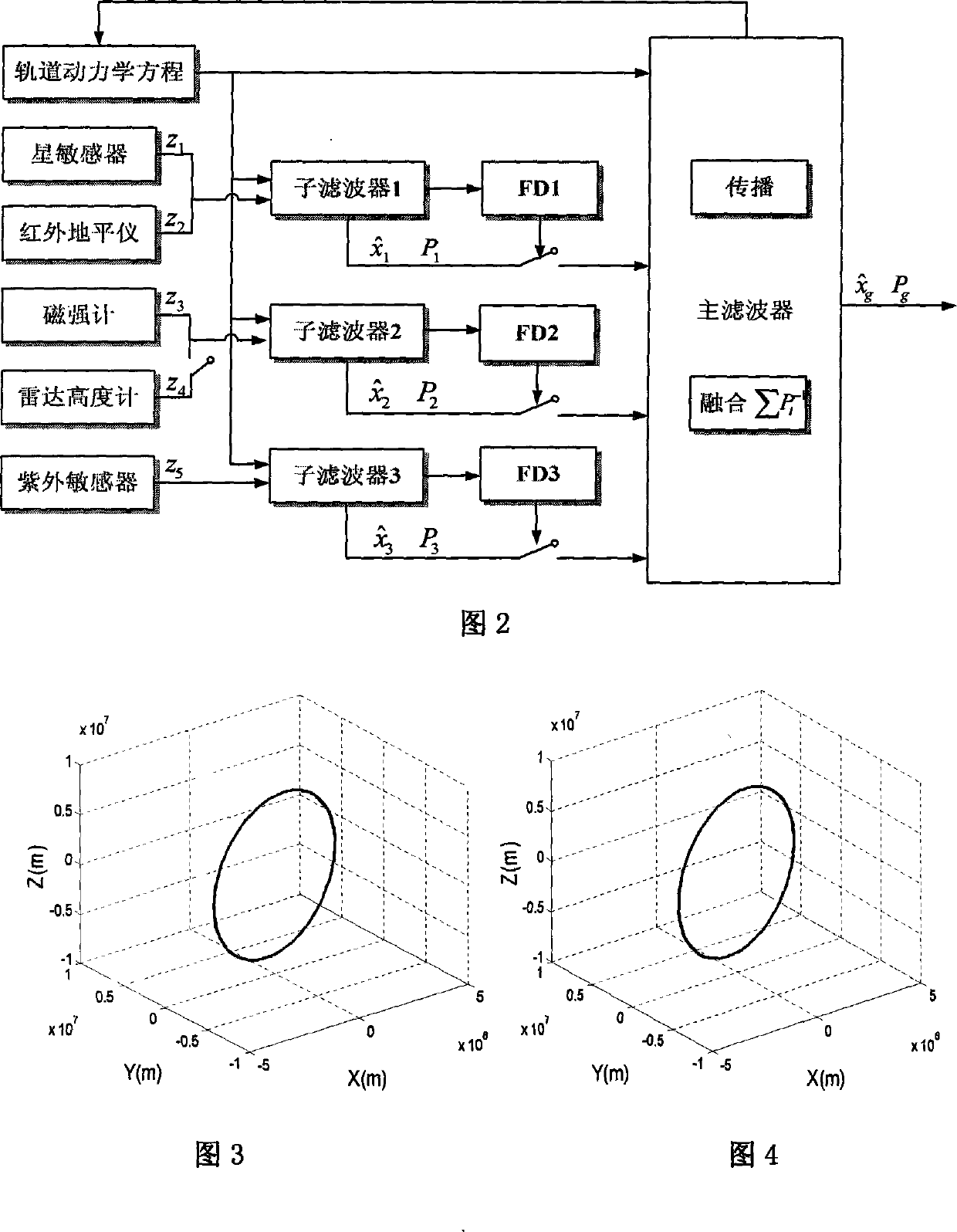
[0099] The specific composition of this example is as follows figure 1 As shown, the implementation process is as follows figure 2 As shown, the orbit data is generated by STK (Satellite Simulation Toolkit) software, and the specific simulation conditions are as follows:
[0100] ①The simulation time is from 12:00 on June 1, 2008 to 24:00 on June 1, 2008, and the sampling period T is 10s. The nominal orbit data is: semi-major axis: a=6823.082km; eccentricity: e=1.83×10 -16 ; Orbital inclination: i=97.2°; right ascension of ascending node: Ω=157.5°; near ascending angle: ω=0°.
[0101] ②In order to simulate the real movement of the satellite in orbit, the mechanical model JGM-3 is used when calculating the satellite orbit, and the following perturbation factors are considered: the earth's non-spherical perturbation; the sun's gravity, the moon's gravity; the sun's light pressure; atmospheric resistance .
[0102] ③Measuring instrument accuracy: the navigation star adopts 8...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com