


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
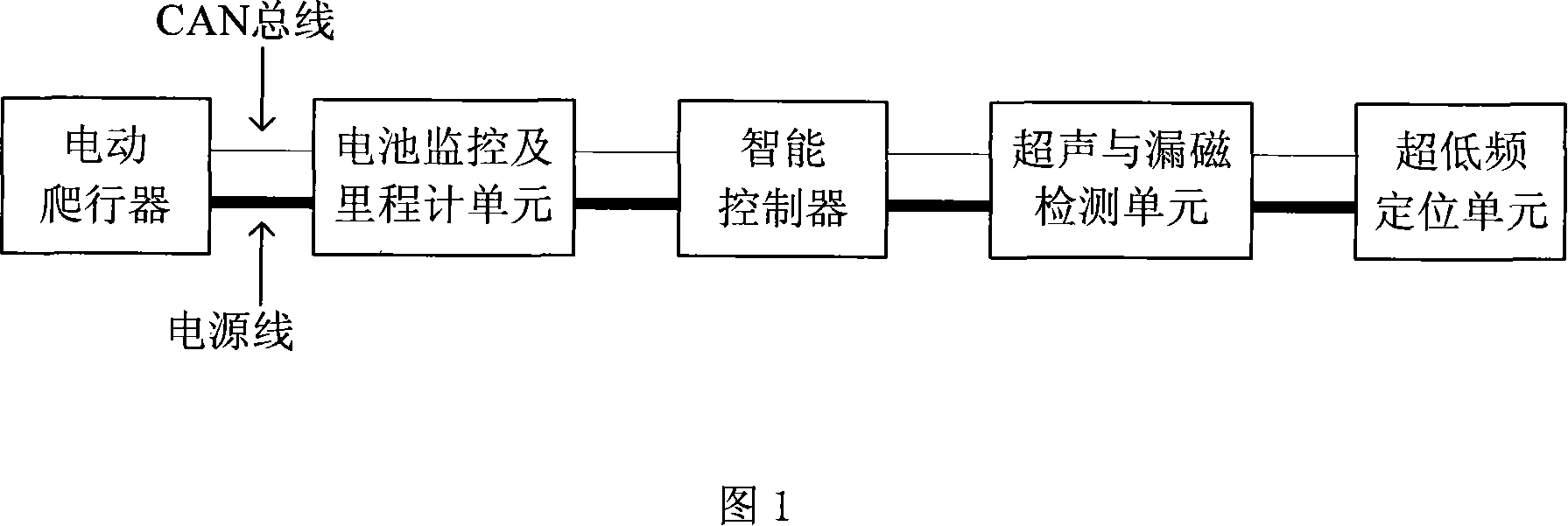
Submarine pipeline detecting robot emulation system
A submarine pipeline and simulation system technology, applied in the system field of the simulation technology field, can solve problems such as sensor failure, simulation, and difficulty in simulating various fault situations, and achieve the effects of improving work efficiency, saving time and manpower
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
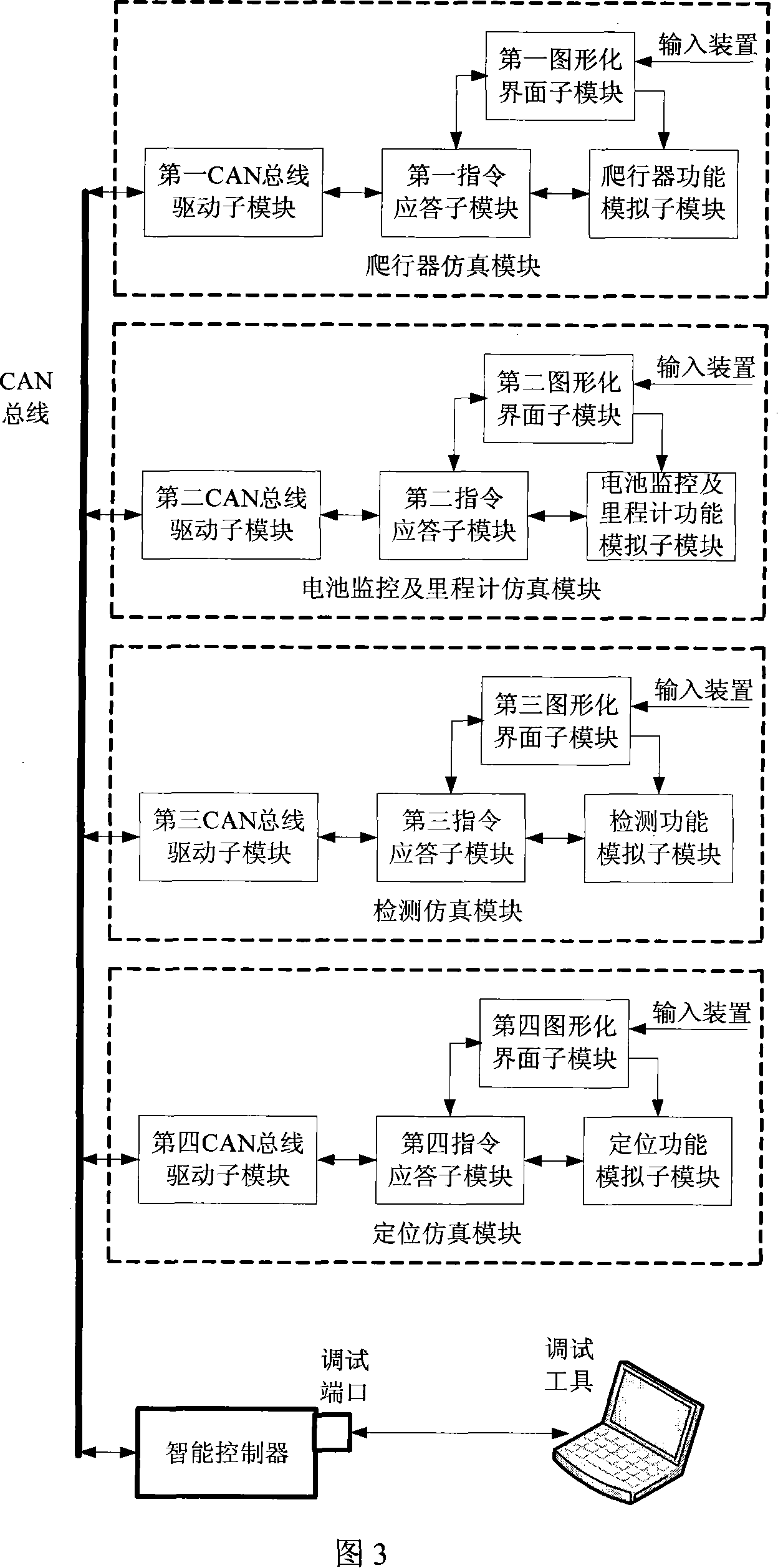
[0028] As shown in Figure 3, this embodiment is used to debug and test the robot intelligent controller, and the parts involved include four simulation modules, as the robot intelligent controller and its debugging tool for being debugged and tested, and various parts CAN bus communication cable between.
[0029] In this embodiment, the submarine pipeline detection robot simulation system uses four main simulation modules: a crawler simulation module, a battery monitoring and odometer simulation module, a detection simulation module and a positioning simulation module. As shown in Figure 3.
[0030] Among them, the crawler simulation module simulates the function and performance of the robot electric crawler, the battery monitoring and odometer simulation module simulates the function and performance of the robot battery monitoring and odometer unit, and the detection simulation module simulates the function and performance of the robot ultrasonic and magnetic flux leakage mon...
Embodiment 2
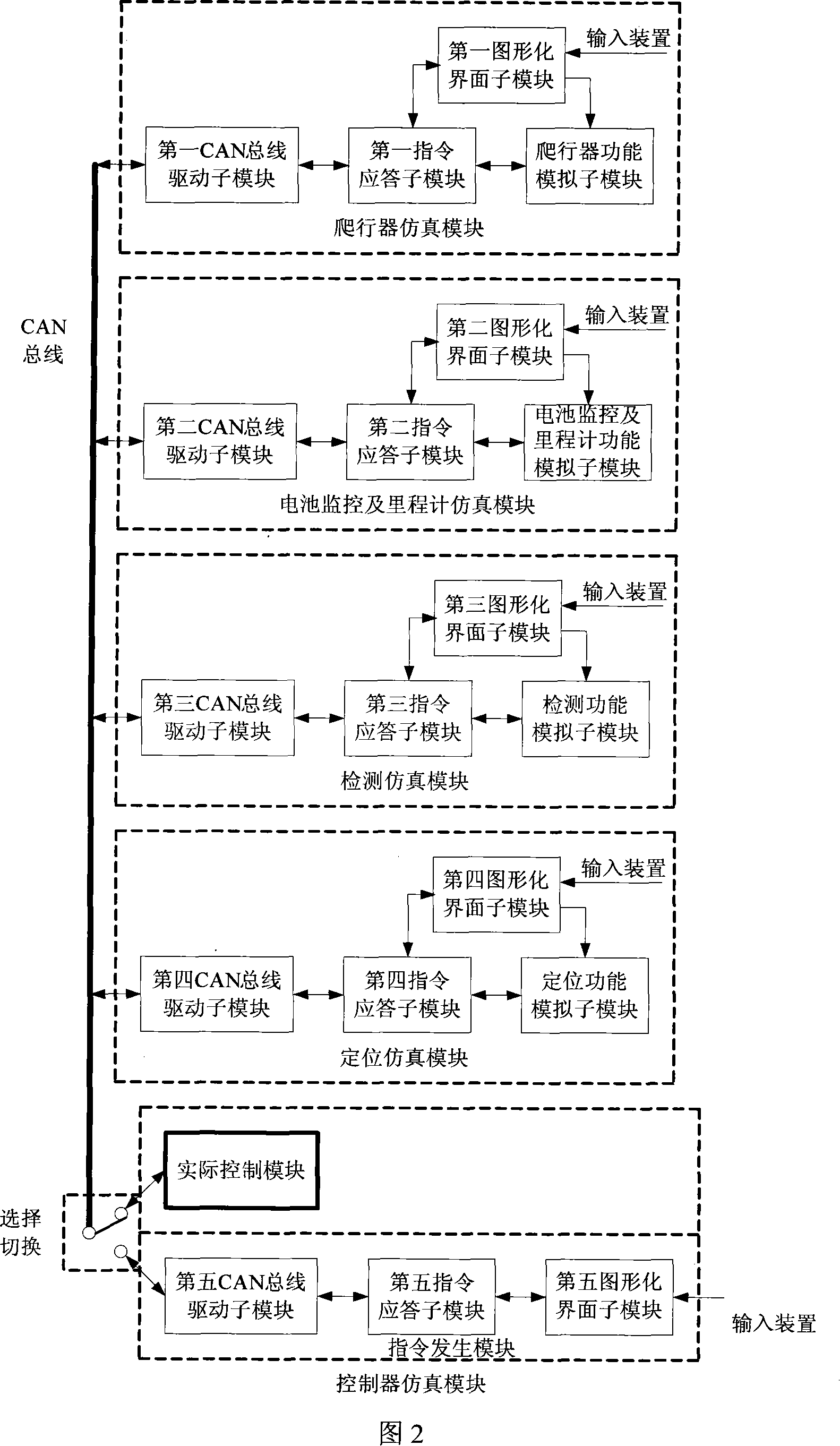
[0042] As shown in Fig. 2, this embodiment is used for the teaching and training of operators and new developers of submarine pipeline inspection robots. The parts involved include all five simulation modules, as well as the CAN bus communication cables between the parts.
[0043] The crawler simulation module, battery monitoring and odometer simulation module, detection simulation module, positioning simulation module, and controller simulation module constitute a complete system to simulate the working conditions of the entire robot to help operators and new developers understand deeply The functions of each unit of the robot and the timing relationship and logical relationship in the control process.
[0044] The working process of the crawler simulation module, the battery monitoring and odometer simulation module, the detection simulation module, and the positioning simulation module are the same as those in the first embodiment, and will not be repeated here.
[0045] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com