Bending joint driven by linear expansion artificial muscle
A technology of artificial muscles and bending joints, applied in the field of bending joints, can solve the problems of complex elastic deformation calculation and poor real-time performance of elastic wave shells/bellows, and achieve the effects of easy volume change, easy structure, and simple control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
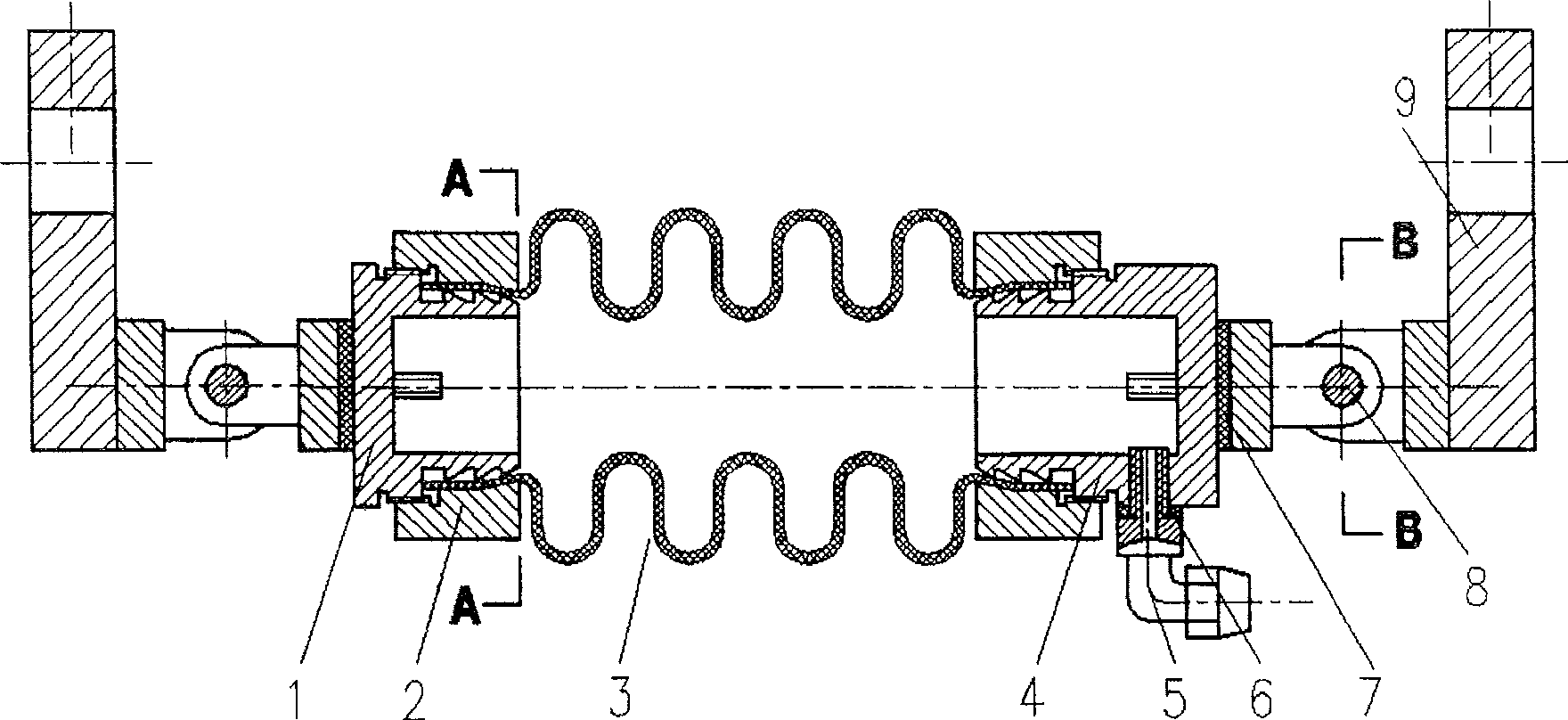
[0023] Below in conjunction with Embodiment 1 of the present invention, the working principle and working process of the curved joint are illustrated:
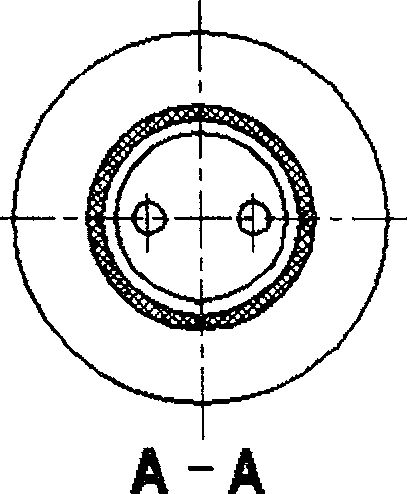
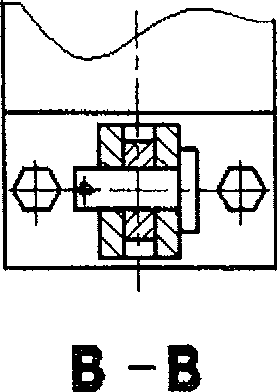
[0024] The elastic wave shell 3, the headstock 1 and the tailstock 4 form a closed artificial muscle cavity, and the pressure-driven fluid enters the cavity through the right-angle joint 5. Due to the action of the hinge 8 on the end faces of the headstock 1 and the tailstock 4, the elastic wave shell 3. Expand linearly along the axis, and the opposite direction and equal expansion force drive the thick plate 9 and make the leaf spring 11 bend, so as to obtain the bending angle between the fingertip section 12 and the middle section 10; relying on the action of the plate spring 11, Fluid without pressure drive is drained, and the joint returns to straightening.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com