Method for determining motion compensation
a motion compensation and motion compensation technology, applied in the field of motion compensation, can solve the problems of deteriorating precision of the level of prediction, inability to accurately make predictions, and inability to make predictions at a higher level of precision, so as to achieve high pixel density, and ensure high level of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
first embodiment
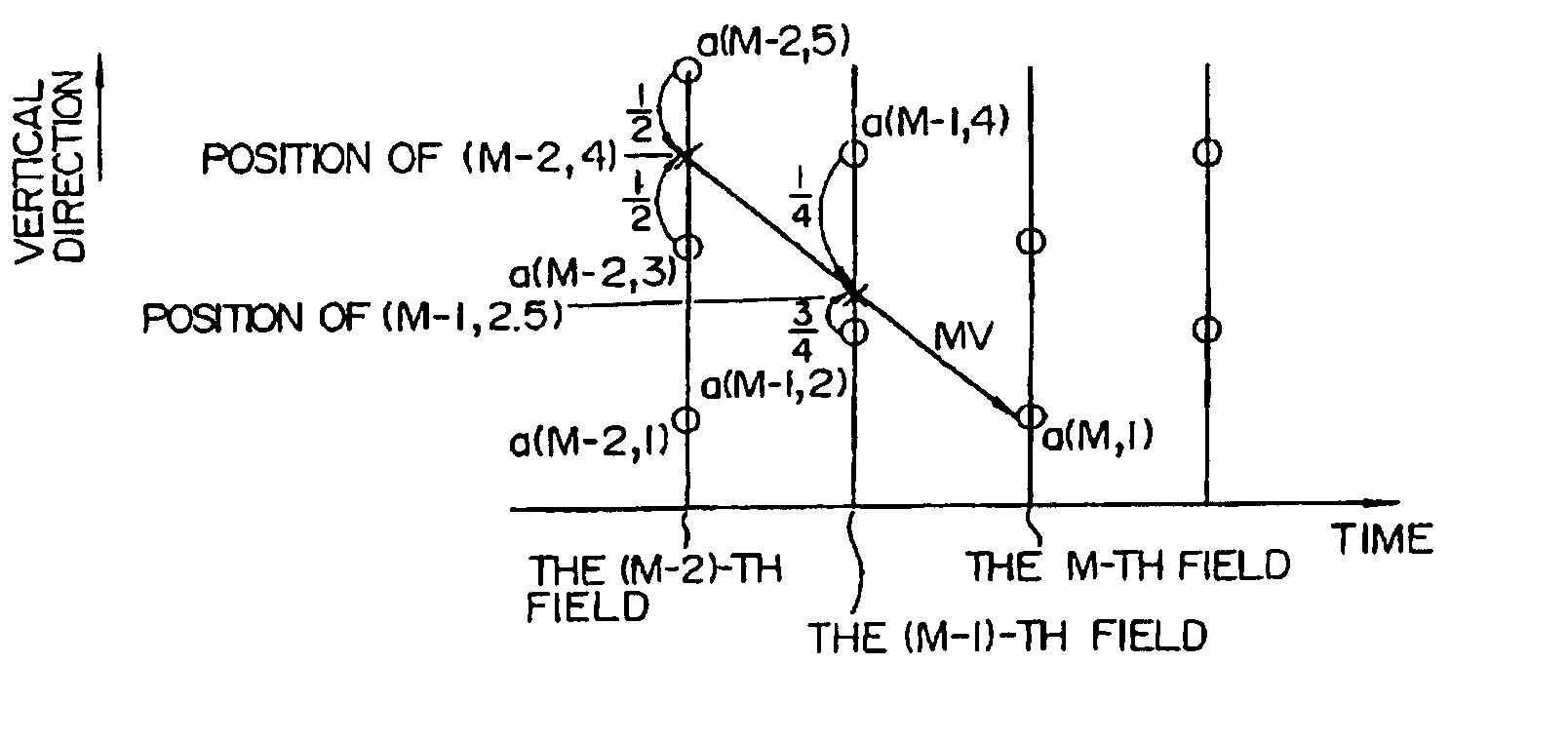
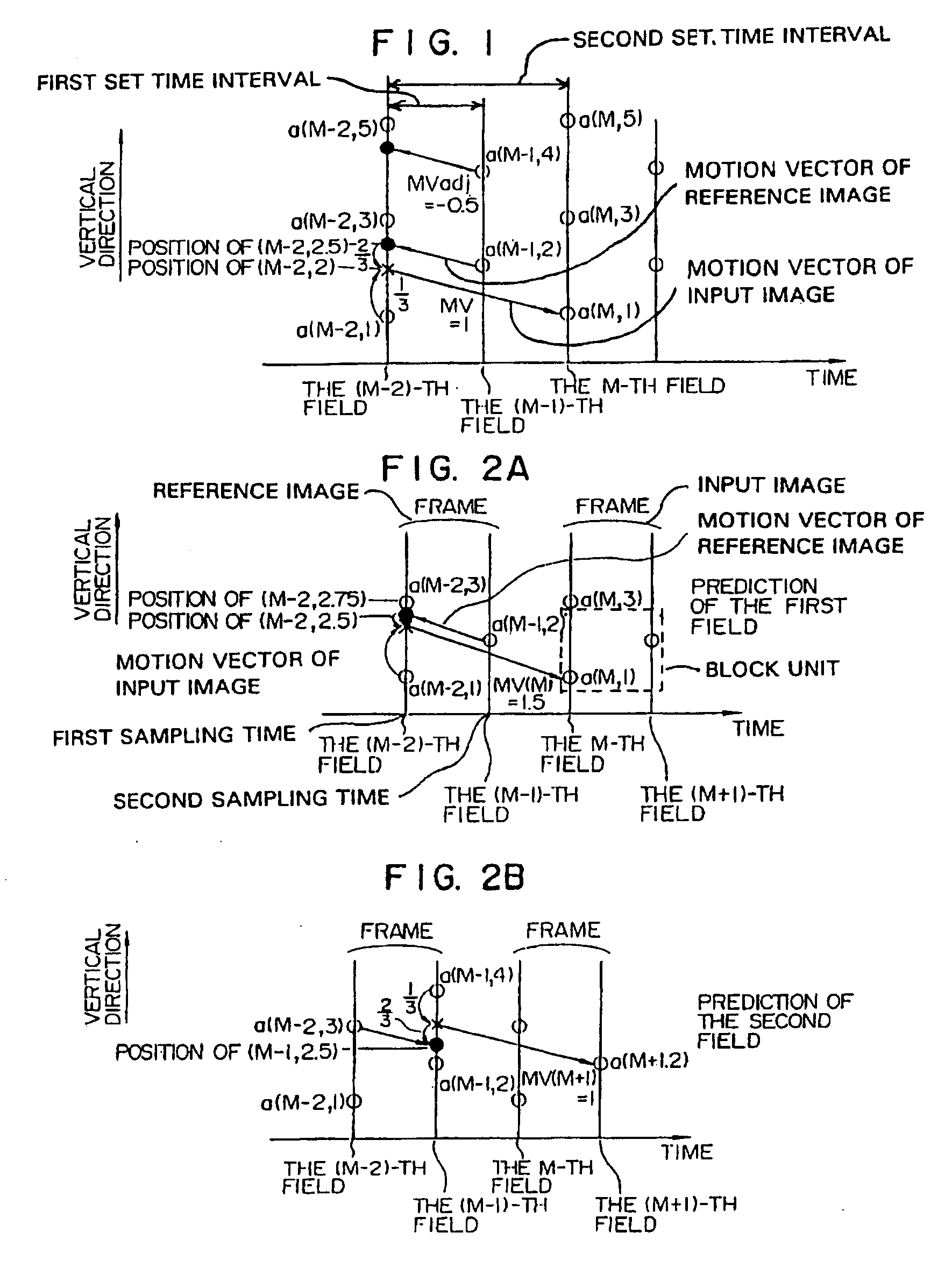
[0026]FIG. 1 is a diagram for explaining the present invention. FIG. 1 assumes the determination of motion compensation based on an interlace signal as an input signal so that a block is generated from an image within a field and a field image is used as a base. In this case, the input image is in the M-th field and a reference image is in both the (M−1)-th field and the (M−2)-th field. Now, assume that a motion vector (MV) for predicting move compensation of a certain block is to be detected in a two-field instance, that is, between the M-th field and the (M−2)-th field. To simplify the explanation, of the detected moves, only motion in the vertical direction will be considered, and a pixel value is expressed as a(x, y). In this case, x represents a field number and y represents a line number. Line numbers are placed in the order of 1, 2, . . . , starting from the bottom in a line interval of the frame. A position of each pixel in a vertical direction is expressed always in the uni...
fourth embodiment
[0042]FIG. 5 is a diagram for explaining the present invention. The fourth embodiment takes the same assumptions as those of the first embodiment, and an interlace signal is used as an input signal, an input image is in the M-th field and a reference image is in both the (M−1)-th field and the (M−2)-th field. Assume in FIG. 5 that a motion vector (MV) for determining motion compensation of a certain block is to be detected in a two-field interval, that is, between the M-th field and the (M−2)-th field. To simplify the explanation, of the detected motion, only motion in a vertical direction will be considered, and a pixel value at each pixel position is expressed in the same manner as that of FIG. 1.
[0043]Now consider the case of obtaining a determined value of a(M, 1). When it is assumed that the vertical component of the detected MV is 3, the determined value of move compensation of the a(M, 1) becomes the pixel value at the position of (M−2, 4). First, this pixel value is obtained...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com